
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Спецглавы теории автоматического управления. Теория цифровых и импульсных автоматических системСтр 1 из 16Следующая ⇒
СПЕЦГЛАВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. ТЕОРИЯ ЦИФРОВЫХ И ИМПУЛЬСНЫХ АВТОМАТИЧЕСКИХ СИСТЕМ Конспект лекций для студентов высших учебных заведений, обучающихся по специальности 160403 – Системы управления летательными аппаратами Красноярск 2010 Оглавление 1 Импульсные системы автоматического управления. 6 1.1 Основные понятия импульсных систем. 6 1.2 Примеры импульсных систем. 11 1.3 Решетчатые функции. 15 1.4 Разности решетчатых функций и разностные уравнения. 16 1.5 Дискретное (D) преобразование Лапласа. 18 1.6 Основные теоремы, правила D-преобразования. 20 1.7 Z преобразование. 22 1.8 Уравнения и ПФ разомкнутых импульсных систем. 23 1.9 Уравнение и ПФ замкнутых импульсных систем. 28 1.10 Частотные характеристики импульсных систем. 30 1.11 Построение ЛЧХ.. 37 1.12 Приближенный метод. 40 1.13 Правила преобразования структурных схем в ИС.. 48 1.14 Устойчивость дискретных систем ……………………………………… 52 1.15 Аналог критерия Михайлова. 54 1.16Аналог критерия Найквиста 57 2 Цифровые системы автоматического управления. 52 2.1 Основные понятия цифровых САУ.. 59 2.2 Пример построения цифровых САУ.. 64 2.3 Устройства выборки и хранения (УВХ) 68 2.4 Цифро-аналоговое преобразование (ЦАП) 69 2.5 Аналого-цифровое преобразование (АЦП) 72 2.6 Цифровые САУ с экстраполятором нулевого порядка. 74 2.7 Построение ЛЧХ в цифровых системах. 76
2.8 Последовательная коррекция с помощью аналоговых регуляторов. 79 2.8.1 Аппроксимация УВХ звеном чистого запаздывания. 80 2.8.2 Синтез с помощью W-преобразования. 84 2.8.3 Коррекция с помощью аналоговых регуляторов в цепи обратной связи 89 2.12 Синтез цифровых регуляторов. 92 2.12.1 Последовательный импульсный фильтр. 93 2.12.2 Импульсный фильтр в цепи ОС.. 95 2.12.3 Комбинированный импульсный фильтр. 96 2.13 Реализация цифровых регуляторов на ЭВМ.. 98 2.13.1 Непосредственное программирование. 98 2.13.2 Последовательное программирование. 102 2.13.3 Параллельное программирование. 102 2.13.4 Сравнительный анализ методов программирования. 106 2.14 О точности задания коэффициентов цифрового корректирующего устройства 107 2.15 Реализация на микроЭВМ элементов и устройств в системе управления 109 2.15.1 Дифференциальные цифровые преобразователи. 109 2.15.2 Алгоритмы дифференцирования. 111
2.15.3 Методические ошибки дифференцирования. 112 2.15.4 Влияние шумов квантования. 115 2.15.5 Цифровые интеграторы.. 117 2.16 Цифровые фильтры.. 119 2.16.1 Нерекурсивные фильтры.. 121 2.16.2 Рекурсивные фильтры.. 124 СПИСОК СОКРАЩЕНИЙ:
АИМ – амплитудно-импульсная модуляция АИС – амплитудно-импульсная система АИЭ – амплитудно-импульсный элемент АЦП – аналогово-цифровой преобразователь ВИМ – времяимпульсная модуляция ВИС – времяимпульсная система ВИЭ – времяимпульсный элемент ВЧ – высокочастотная область ИС – импульсная система ИФ – импульсный фильтр ИЭ – импульсный элемент КИМ – кодоимпульсная модуляция КПД – коэффициент полезного действия КУ – корректирующее устройство ЛАХ – логарифмическая амплитудная характеристика ЛЧХ – логарифмическая частотная характеристика НЦФ – нерекурсивный цифровой фильтр НЧ – низкочастотная область ОС – обратная связь ПФ – передаточная функция РЦФ – рекурсивный цифровой фильтр САУ – система автоматического управления УВХ – устройство выборки и хранения ФИМ – фазо- импульсная модуляция ФЧХ – фазо-частотная характеристика ЦАП – цифро-аналоговый преобразователь ЦВМ – цифровая вычислительная машина ЦСАУ – цифровая система автоматического управления ЦФ – цифровой фильтр ЧИМ – частотно-импульсная модуляция ШИМ – широтно-импульсная модуляция ШИС – широтно-импульсная система ШИЭ – широтно-импульсный элемент ЭВМ – электронная вычислительная машина
Импульсные системы автоматического управления Основные понятия импульсных систем Известные способы передачи и преобразования сигналов делятся на непрерывные и дискретные. При непрерывном способе передается и преобразуется каждое мгновенное значение сигнала. При этом могут использоваться различные виды модуляции. В дискретных способах передачи или преобразования сигналы подвергаются квантованию по времени, уровню или смешанному квантованию (рисунок 1.1.1).
Квантованию по уровню соответствует фиксация дискретных уровней сигнала в произвольные моменты времени (рисунок 1.1.1а).
Квантование по времени соответствует фиксации дискретных моментов времени, при которых уровни сигнала могут принимать произвольные значения (рисунок 1.1.1б). При смешанном или одновременном квантовании по времени и по уровню (рисунок 1.1.1в) непрерывный сигнал заменяется дискретными уровнями, ближайшими к значениям непрерывного сигнала в дискретные моменты времени. САУ по виду квантования делятся на импульсные (квантование по времени), релейные (квантование по уровню) и цифровые или релейно-импульсные (смешанное квантование). В импульсных системах обычно используется импульсная модуляция. Процесс импульсной модуляции состоит в изменении по определенному временному закону какого – либо параметра периодически повторяющихся импульсов. Основными параметрами немодулированной последовательности импульсов (рисунок 1.1.2) являются: А – амплитуда, Т – период повторения, gТ – длительность или ширина импульса, параметр g называют скважностью.
Рисунок 1.1.2
Расстояние между импульсами определяется частотой Процесс импульсной модуляции состоит в изменении по определённому временному закону какого-либо параметра периодически повторяющихся импульсов. Величина, определяющая закон модуляции, называется модулирующей величиной. Если параметры последовательности импульсов изменяются в зависимости от значений модулирующей величины в фиксированные равноотстоящие друг от друга моменты времени, то это импульсная модуляция ПЕРВОГО рода (ИМI). При ИМI амплитуда А, скважность γ, период Т, фаза или частота определяются значением модулирующей величины в равноотстоящие дискретные моменты времени (рисунок 1.1.3 а, в, г). Если же параметры последовательности импульсов изменяются в соответствии с текущим значением модулирующей величины, то такой вид модуляции называют импульсной модуляцией ВТОРОГО рода (ИМII). При ИМII амплитуда изменяется в течение времени существования импульса, а ширина, временной сдвиг (фаза или частота) определяются значением модулирующей величины в моменты времени, промежутки между которыми отличны от промежутков между немодулируемыми импульсами (рисунок 1.1.3 б).
Рисунок 1.1.3
Величина εТ- время сдвига модулируемого импульса относительно синхронизирующего импульса с периодом Т=2π/ω0, Т=1/ f. В зависимости от модулируемого параметра различают: 1. Амплитудно-импульсную модуляцию (АИМ). 2. Широтно-импульсную модуляцию (ШИМ). 3. Времяимпульсную модуляцию (ВИМ), которая делится на: а) ЧИМ – частотно-импульсная модуляция, б) ФИМ – фазоимпульсная модуляция. 4. Кодоимпульсная модуляция (КИМ), в ней одновременно происходит квантование и по времени и по уровню. Рассмотренные виды модуляции являются двухтактными. При однотактной модуляции импульсы имеют постоянный знак. Импульсные системы представляют собой соединение импульсного элемента и непрерывной части:
Рисунок 1.1.4 – Cтруктурные схемы импульсных систем
Основными параметрами ИЭ (импульсного элемента) являются коэффициенты передачи Кп, период Т=2π/ω0, частота ω0 следования импульсов, длительность γТ, форма импульса S (t). Под характеристикой ИЭ понимают зависимость величины модулированного параметра выходной последовательности импульсов от дискретных значений входной величины. Эта характеристика может быть линейной и нелинейной.
В линейном диапазоне крутизна (c) характеристики ИЭ определяется отношением величины модулируемого параметра выходной последовательности импульсов к соответствующему дискретному значению входной величины ИЭ. Крутизна линейной характеристики АИЭ равна коэффициенту усиления (Ки) ИЭ. Величина Ки определяет постоянную высоту выходных импульсов, а знак их определяется знаком Хм.
а) б) в) а) характеристика АИЭ б) характеристика ВИЭ в) характеристика ШИЭ Хм - значение входной величины в дискретный момент времени, γТ и e1Т – соответствующие длительность и положение импульса Рисунок 1.1.5 – Характеристики ИЭ
Характеристики широтного и временного ИЭ являются четными функциями входной величины В зависимости от вида и рода ИЭ импульсные системы подразделяются на три типа: амплитудно-импульсные системы (АИС), широтно- импульсные системы (ШИС), время-импульсные системы (ВИС). При это может использоваться модуляция первого и второго рода. Эти ИС могут быть замкнутыми и разомкнутыми. ИС могут содержать один или несколько ИЭ. Системы с несколькими ИЭ делятся на асинхронные и синхронные (рисунок 1.1.6). В асинхронных системах периоды повторения по крайней мере двух ИЭ различны. В синхронных ИС периоды повторения всех ИЭ равны между собой. Частным случаем синхронных ИС являются синфазные системы, в которых совпадают не только импульсы, но и фаза. Частным случаем асинхронных ИС являются многократные, в которых периоды различных ИЭ кратны периоду одного из них. В синфазных многократных системах моменты возникновения кратных импульсов одинаковы (рисунок 1.1.6).
Рисунок 1.1.6
В линейных системах выполняется принцип суперпозиции или принцип наложения, а параметры ИЭ и непрерывной части системы не зависят от внешних сигналов и величин, характеризующих состояние системы. К линейным ИС относятся АИС с линейным ИЭ и линейной непрерывной частью. К нелинейным ИС относятся ШИС и ВИС, а также АИС с нелинейной характеристикой ИЭ или с нелинейной непрерывной частью. Примеры импульсных систем Импульсный фильтр Импульсный фильтр - устройство, реагирующее на значения входного сигнала в дискретные равноотстоящие моменты времени.
Ключ представляет собой амплитудный импульсный модулятор. Входной сигнал рассмотрим в виде гармонического сигнала Если частота ключа
Рисунок 1.2.4
Если
r – ближайшее к целому отношение
Рисунок 1.2.5
Пример применения: устранение периодических помех. Входной сигнал содержит периодическую помеху:
Фильтр устраняет помеху (рисунок 1.2.6)
Рисунок 1.2.6
Если выбрать частоту ключа Решетчатые функции Решетчатыми называются функции, значение которых определяется только в дискретные равностоящие значения независимой переменной (моменты времени). Между этими дискретными значениями решетчатая функция равна нулю (рисунок 1.3.1). Решетчатая функция (РФ) обозначается f[nT], где T- положительная величина. Определяющая расстояние между дискретами, n- целое число. Для переход от непрерывной функции к РФ нужно заменить t = nT f(t)=ekt , f[nT]= eknT Так как между дискретными значениями решетчатая функция равна нулю, то для определения значения функции между дискретами вводится понятие смещённой решетчатой функции: f[ nT +∆ t ]=f[ nT,∆ t ], - T < Одной и той же решетчатой функции могут соответствовать различные непрерывные и разрывные функции, если их ординаты в дискретные моменты времени соответствуют дискретам решетчатых функций. Такие функции называют огибающими решетчатыми функциямирешетчатых функций
Рисунок 1.3.2 Простейшей огибающей решетчатой функцией является ступенчатая функция, проведенная через вершину дискрет (рисунок 1.3.2). Если ввести переменную
Построение ЛЧХ Если ПФ ИС задана в D-форме, то для построения ЛЧХ нужно выполнить две операции: 1. Перейти от трансцендентной формы к дробно-рациональной, то есть произвести замену eq = z и W *(q) = W *(z). Однако, при этом особый отрезок L на q -плоскости переходит в окружность единичного радиуса на плоскости z. 2. Для построения ЛЧХ необходимо эту окружность преобразовать в мнимую ось и при этом частота будет изменяться от -∞ до +∞. Для этих целей используется так называемое билинейное или W-преобразование.
Для практики удобнее использовать модифицированное w-преобразование:

Методика построения ЛЧХ: 1. ПФ непрерывной части представляют в виде суммы простых слагаемых. 2. Для каждого слагаемого по таблицам операционных соответствий находят z-изображение. 3. Путем суммирования всех слагаемых находят z -передаточную функцию импульсной системы. W *(z) = TZ { W (s)} 4. Путем подстановки (1.11.1) переходят к ПФ в форме W*(w). 5. Заменяя w= Пример: ПФ приведенной НЧ имеет вид:
Необходимо построить ЛЧХ импульсной системы с периодом квантования Т. 1) Разложим W (S) на простые слагаемые (1.11.1):
2) С помощью таблиц Z - преобразований находим операционные соответствия
3) Найдем ПФ 4) Найдем ПФ 5) ЛЧХ ИС описывается следующими выражениями (1.11.2) и (1.11.3)
где
Рисунок 1.11.1
Kак видно из ЛАХ (рисунок 1.11.1) в облаcти частот ω*<<2/Т ЛАХ непрерывной части L (ω) и импульсной системы L *(ω*) практически совпадают. Аналогичный вывод можно сделать из теоремы Котельникова-Шеннона. Теорема: чтобы регенерировать (восстановить) непрерывный сигнал из входного дискретного частота квантования ω0 должна быть больше удвоенного значения максимальной частоты ω m или равна ему. Таким образом
При выполнении последнего условия, то есть когда частота среза меньше 2/Т импульсную систему можно считать непрерывной. Поскольку в рассмотренном примере частоты сопряжения множителей Приближенный метод Приближенный метод построения ЛЧХ основан на следующих допущениях: 1.) Частота среза системы принадлежит НЧ области, т.е. ωс<2/Т, где Т – период следования импульса. 2.) ПФ приведенной непрерывной части описывается только звеньями первого порядка
Кν – добротность, ν – порядок астатизма. 3.) Звенья знаменателя с постоянными времени Т1…Т n можно разделить на две группы: Ti > Т /2, i=1,q Т i < Т /2, i= q+1, n Звенья передаточной функции непрерывной части разделяются на низкочастотные и высокочастотные, в зависимости от того где находятся частоты сопряжения. При ω i <2/ T – низкочастотная (НЧ) область, при ω i >2/Т – высокочастотная (ВЧ) область. 4.) Звенья числителя формируют НЧ область 5.) Пересечение асимптот ЛАХ с вертикальной прямой Рассмотрим эти случаи отдельно. Случай 1. Пересечение вертикальной прямой ПФ ВЧ области запишем в виде:
где ωов – базовая частота. Определяется как частота пересечения первой асимптоты ВЧ области с осью частот (рисунок 1.12.1).
Рисунок 1.12.1
Рассмотрим вначале простой случай: ЛАХ ВЧ области имеет вид (рисунок 1.12.2)
Рисунок 1.12.2
Построим ЛАХ импульсной системы, соответствующей выражению (1.12.3). Разложим выражение (1.12.3) на простые слагаемые:
Затем используя таблицу Z-преобразований, запишем
Используя W-преобразование
ПФ импульсной системы в ВЧ области принимает вид:
Тогда импульсной системе соответствует ЛАХ
Рисунок 1.12.3
Для ПФ (1.12.6) выражения ЛЧХ имеют вид:
Рисунок 1.12.4
В более сложном случае (1.12.2), ПФ ВЧ области представляют в приближенном виде:
Если
ПФ дополнительного множителя имеет вид
При τ0 =0, Применим w-преобразование к выражению (1.12.12).
ПФ ВЧ области импульсной системы в этом случае имеет вид:
Для ПФ (1.12.14) выражения ЛЧХ имеют вид:
Стыковку ЛАХ НЧ и ВЧ областей проводят на вертикальной прямой
Рисунок 1.12.5
Случай 2. Пересечение с вертикальной прямой ПФ ВЧ области запишем в виде:
Рассмотрим вначале простой случай:
ЛАХ ВЧ области импульсной системы:
Рисунок 1.12.6
Для ПФ (1.12.20) выражения ЛЧХ имеют вид:
В более сложном случае, ПФ ВЧ области представляют в виде:
Для ПФ (1.12.24) выражения ЛЧХ имеют вид:
ЛАХ ВЧ области импульсной системы:
Рисунок 1.12.7 Аналог критерия Найквиста Рассмотрим ПФ разомкнутой импульсной системы:
Примем e=0 и введём вспомогательную функцию
где Из аналога критерия Михайлова следует, что для устойчивости замкнутой системы необходимо выполнение условия:
Возможны три случая состояния разомкнутой системы: Устойчивая разомкнутая система В этом случае по аналогу критерия Михайлова можно записать Поскольку замкнутая система должна быть устойчивой, то
а приращение аргумента вспомогательной функции
Т.е. годограф Таким образом, для устойчивости замкнутой системы, при устойчивой разомкнутой, необходимо и достаточно, чтобы годограф вспомогательной функции
Рисунок 1.14.4 В случае астатической системы степени ν также как и для непрерывных систем, годограф АФХ (рис.1.14.5) дополняется дугой бесконечного радиуса на угол
Рисунок 1.14.5
В случае неустойчивой разомкнутой системы уравнение Тогда приращение аргумента вспомогательной функции
Для устойчивости замкнутой системы при неустойчивой разомкнутой необходимо и достаточно, чтобы разность числа положительных и отрицательных переходов годографа АФХ (рисунок 1.14.6) через отрезок действительной оси (- 1; j 0) была равна
Рисунок 1.14.6 Например, если разомкнутая система неустойчива и Основные понятия цифровых САУ Одно из самых перспективных направлений создания совершенных автоматических систем связано с применением для целей управления цифровых вычислительных машин (ЦВМ). Основные достоинства от введения ЦВМ в замкнутый контур: 1) Более высокая точность при относительно низкой стоимости. Точность непрерывных (аналоговых) САУ определяется точностью входящих в них устройств. Поэтому с увеличением точности, стоимость таких систем растет нелинейно (рисунок 2.1.1). Точность ЦСАУ определяется числом разрядов в машинном числе, поэтому точность определяется количеством оборудования и стоимость с увеличением точности растет, практически, линейно.
Рисунок 2.1.1
2) Гибкость управления, т.е. алгоритм управления может быть легко изменен изменением программы, а не изменением аппаратной части как в аналоговых (непрерывных) системах. Это значительно проще и дешевле, чем изменение аппаратной части в непрерывных системах. 3) Возможность организации более сложных (адаптивных и т.п.) алгоритмов управления. 4) Возможность реализации других (вспомогательных) целей управления, улучшающих эксплуатационные свойства системы. Недостатки: 1) На процесс вычисления затрачивается определенное время, что приводит к появлению чистого запаздывания в цифровых системах. 2) В цифровых системах проявляются нелинейные свойства из-за квантования по уровню и импульсные свойства из-за квантования по времени. Перечисленные недостатки приводят к уменьшению быстродействия ЦСАУ по сравнению с аналоговыми. По характеру связи между ЦВМ и САУ их делят на автономные и не автономные. Под автономными понимают САУ (рисунок 2.1.2) в которой ЦВМ служит лишь в качестве источника входной информации, т.е. выполняет функции задающего устройства. Вычисление сигнала ошибки, цифровая коррекция динамических свойств осуществляется при этом ДВУ.
ДВУ – дополнительное вычислительное устройство; ПКН – преобразователь код- напряжение (цифро-аналоговый преобразователь (ЦАП)); УПУ – усилительно преобразовательное устройство; ИЭ – исполнительный элемент; ОУ – объект управления; ИУ – измерительное устройство; УМ – усилитель мощности; ЦВМ – цифровая вычислительная машина; ЧЭ – чувствительный элемент; ПНК – преобразователь код-напряжение или аналогово-цифровой преобразователь. Рисунок 2.1.2 – Структурная схема автономной системы. Если сравнение задаваемого и обрабатываемого кодов происходит в самой ЦВМ, то такая система (рисунок 2.1.3) называется неавтономной. При этом задача цифровой коррекции возлагается также на ЦВМ.
Рисунок 2.1.3 – Структурная схема неавтономной системы.
Внешне эти системы отличаются несущественно. Но они могут значительно различаться в динамических свойствах, т.к. допустимая частота квантования (период дискретности) этих систем неодинакова. Автономные ЦСАУ имеют большее быстродействие по сравнению с не автономными, у которых бортовая ЦВМ введена в замкнутый контур управления. Так как, бортовые ЦВМ решают широкий круг задач, обычно не связанных с работой данной САУ, то частота выдачи управляющих воздействий в неавтономных системах не может быть большой. Достоинство неавтономных САУ – меньшая стоимость. В ЦСАУ к квантованию по времени добавляется квантование по уровню.
Рисунок 2.1.3
Обозначим через h размер одной ступени (шаг) квантования по уровню, тогда величина каждого значения решётчатой функции выходной величины цифрового звена
где k- целое число ступеней h. Сигнал в виде решетчатой функции преобразуется в непрерывный сигнал с помощью экстраполятора. Простейшим является экстраполятор нулевого порядка Э0, представляющий собой фиксатор, удерживающий выходную величину на постоянном уровне в течение периода квантования. В преобразователях напряжение – код или АЦП на выходе формируется цифровое значение равное целому числу k шагов квантования, содержащихся в аналоговом сигнале.
Остаток D h либо усекается, либо округляется до целого снизу или сверху значения У h. При усечении все биты, меньшие, чем самый младший бит, отбрасывают. D h - абсолютная ошибка квантования (шум квантования), заключается в следующих пределах:
–при округлении (2.1.3)
В цифровых системах дискретное число k кодируется и вся операция по переводу непрерывного числа в цифровое в определённой системе счисления называется кодо-импульсной модуляцией. Чем больше k и чем меньше шаг Т квантования по времени, тем точнее дискретный сигнал воспроизводит аналоговый. Но дискретное число никогда не равно аналоговому. Точность преобразования (цена младшего разряда) определяется выражением h = A /2 k, где А – диапазон изменений непрерывной переменной, k – число двоичных разрядов. При заданной статической ошибке системы e обычно принимают h = e /2. При заданных e и А можно найти требуемое число разрядов.
Например, при А=3600 и В общем случае непрерывное значение Структурная схема цифровой САУ с аналоговым входным сигналом имеет вид:
Д(z) – алгоритм вычисления ЦВМ; Рисунок 2.1.4 – Структурная схема цифровой САУ с аналоговым входным сигналом
|
|||||||||||
|
|
Последнее изменение этой страницы: 2019-05-20; просмотров: 538; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.226.177.223 (0.244 с.) |
 Рисунок 1.1.1
Рисунок 1.1.1
 .
.


 .
. совпадает с частотой входного сигнала
совпадает с частотой входного сигнала  , то напряжение нагрузки представляет собой последовательность импульсов постоянной величины (рисунок 1.2.4).
, то напряжение нагрузки представляет собой последовательность импульсов постоянной величины (рисунок 1.2.4).
 в виде последовательности импульсов, огибающая которых будет изменяется с разностной частотой
в виде последовательности импульсов, огибающая которых будет изменяется с разностной частотой 
 (1.2.1)
(1.2.1)

 .
. - полезный сигнал
- полезный сигнал - помеха с частотой ω2
- помеха с частотой ω2
 и обеспечить синфазность в дискретные моменты времени
и обеспечить синфазность в дискретные моменты времени  , то
, то 

 <+ T. Рассматривая ∆ t как параметр можно определить выходной сигнал в любой момент времени, то есть импульсный сигнал представить как непрерывную функцию.
<+ T. Рассматривая ∆ t как параметр можно определить выходной сигнал в любой момент времени, то есть импульсный сигнал представить как непрерывную функцию.

 будет иметь вид
будет иметь вид  .
.


 , строят ЛЧХ по выражениям 1.11.3 и 1.11.4.
, строят ЛЧХ по выражениям 1.11.3 и 1.11.4.
 (1.11.1)
(1.11.1)


 (1.11.2)
(1.11.2) (1.11.3)
(1.11.3) – эквивалентная постоянная времени.
– эквивалентная постоянная времени.
 . Для систем автоматического управления с единичной ОС величину ω m ограничивают полосой пропускания, при этом
. Для систем автоматического управления с единичной ОС величину ω m ограничивают полосой пропускания, при этом  .
. (1.11.4)
(1.11.4) лежат далеко за частотой среза, то они практически на свойства системы влияние не оказывают. В сложных случаях для построения ЛЧХ используют приближенный метод.
лежат далеко за частотой среза, то они практически на свойства системы влияние не оказывают. В сложных случаях для построения ЛЧХ используют приближенный метод. (1.12.1)
(1.12.1)
 возможно при наклонах «-20дБ/дек» и «-40дб/дек».
возможно при наклонах «-20дБ/дек» и «-40дб/дек». с первой асимптотой ВЧ области ЛАХ при наклоне «-20дБ/дек».
с первой асимптотой ВЧ области ЛАХ при наклоне «-20дБ/дек». , (1.12.2)
, (1.12.2)
 (1.12.3)
(1.12.3)
 (1.12.4)
(1.12.4) (1.12.5)
(1.12.5)
 , получим:
, получим: (1.12.6)
(1.12.6) - эквивалентная постоянная времени, гиперболический котангенс определяется выражением:
- эквивалентная постоянная времени, гиперболический котангенс определяется выражением:  , при
, при  ,
,  ,
,  .
. . (1.12.7)
. (1.12.7)  , а непрерывной -
, а непрерывной -  (рисунок 1.12.3).
(рисунок 1.12.3).
 (1.12.8)
(1.12.8) (1.12.9)
(1.12.9)
 , (1.12.10)
, (1.12.10) наибольшая постоянная времени,
наибольшая постоянная времени,

 (1.12.11)
(1.12.11)  , то можно ограничиться первым членом разложения ПФ звена запаздывания в ряд Тейлора:
, то можно ограничиться первым членом разложения ПФ звена запаздывания в ряд Тейлора: .
.  (1.12.12)
(1.12.12) , при τ0 = Т,
, при τ0 = Т, 
 (1.2.13)
(1.2.13)  (1.12.14)
(1.12.14) (1.12.15)
(1.12.15) (1.12.16)
(1.12.16) (рис.1.12.5).
(рис.1.12.5).
 первой асимптоты ВЧ области ЛАХ при наклоне «-40дБ/дек».
первой асимптоты ВЧ области ЛАХ при наклоне «-40дБ/дек». , (1.12.17)
, (1.12.17) (1.12.18)
(1.12.18) (1.12.19)
(1.12.19) (1.12.20)
(1.12.20)
 (1.12.21)
(1.12.21) (1.12.22)
(1.12.22) (1.12.23)
(1.12.23) (1.12.24)
(1.12.24) (1.12.25)
(1.12.25) (1.12.26)
(1.12.26)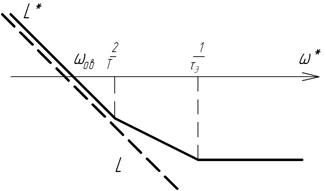

 , (1.14.15)
, (1.14.15) - характеристический полином замкнутой системы,
- характеристический полином замкнутой системы,  - характеристический полином разомкнутой системы, порядки полиномов равны между собой и равны m.
- характеристический полином разомкнутой системы, порядки полиномов равны между собой и равны m.
 (1.14.16)
(1.14.16) .
.

 не должен охватывать начало координат.
не должен охватывать начало координат. не охватывал начало координат, а соответствующий годограф АФХ
не охватывал начало координат, а соответствующий годограф АФХ  не охватывал точку
не охватывал точку  (рисунок 1.14.4).
(рисунок 1.14.4).
 , затем применяется предыдущий критерий.
, затем применяется предыдущий критерий. ν=1
ν=1 имеет l корней вне окружности единичного радиуса, то
имеет l корней вне окружности единичного радиуса, то  , при
, при  .
.
 .
.
 ), то согласно рис.1.14.6 замкнутая ИС будет устойчива.
), то согласно рис.1.14.6 замкнутая ИС будет устойчива.



 (2.1.1)
(2.1.1)
 (2.1.2)
(2.1.2)
 – при усечении (2.1.4)
– при усечении (2.1.4) - относительная погрешность.
- относительная погрешность. .
. , получаем n >13 двоичных разрядов.
, получаем n >13 двоичных разрядов. погрешность округления
погрешность округления  , Yk - цифровое число, Y - непрерывное число.
, Yk - цифровое число, Y - непрерывное число.



