
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Задачи на простое письменное счисление пути судна ⇐ ПредыдущаяСтр 4 из 4 Основные формулы и определения При осуществлении простого письменного счисления используется схема, изображенная на рис. 5.1 и следующие формулы: РШ = S cos К, ОТШ = S sin К, РД = РМЧ tg К.
Рис. 5.1 Рассчитанные по этим формулам данные таблиц приведены в МТ-75 и используются для решения задач по определению пути судна. Координаты пункта прихода j2, l2 рассчитаем с помощью формул или МТ-75 по известным координатам пункта отхода j1, l1, курсу K и плаванию S. Определение координат прихода с использованием таблиц осуществляется в следующем порядке: а) значение РШ найдем в табл. 24 МТ-75 по аргументам ИК и S, вычислим j2 = j1 + РШ; б) величину ОТШ выберем в табл. 24 МТ-75 (при учете дрейфа вместо ИК аргументом для входа в таблицу служит ПУa); в) рассчитаем среднюю широту Курс и плавание между пунктом отхода (j1, l1) и пунктом прихода (j2, l2.) рассчитаем, используя следующее выражение:
Примеры решения задач: 1. Из точки с координатами j1 = 45°50,0' S, l1 = 62°12,0¢ E судно прошло S л = 291,0 миль, ИК = 220,0°. Определить j2, l2. Решение. Используем формулы: РШ = 291,0 · cos 220º = –222,92¢ = 3°42,92' к S, ОТШ = 291,0 · sin 220º = –187,05121¢, j2 = 45°50,0' S + 3º42,9' к S = –45º50,0¢ – 3°42,92¢ = –49°32,92 = 49°32,9¢ S,
l2 = 62°12,0¢ Е – 4°37,9¢ = 57°34,1¢ Е. Решение с помощью таблиц МТ-75: 1. Используем данные табл. 24:
2. С учетом значений ОТШ и j m из табл. 25-а выберем величину РД:
2. Из точки с координатами j1 = 49°10,0¢ N, l1 = 29°17,0¢ W судно должно прийти в точку j2 = 56°45,0¢ N, l2 = 39°05,0¢ W. Определить курс К и плавание S судна по локсодромии S л. Решение. С учетом данных табл. 26 МТ-75 находим разность меридианальных частей РМЧ: j2 = 56°45,0¢ – МЧ2 = 4135,9 экваториальных миль, j1 = 49°10,0¢ – МЧ1 = 3379,9 экваториальных миль, РМЧ = 756,0 экваториальных миль. Определяем РД¢: РД¢ = –39°05,0¢ – (-29°17,0¢) = –9°48,0¢ = -588,0 экваториальных миль,
К = –37,87º в четвертном счете, К = 322,13º в круговом счете, РШ¢ = 56°450¢ – 49°10,0¢ = +7°35¢к Е = +455,0¢ морских миль
РАЗДЕЛ 6. ЗАДАЧИ НА ПРОКЛАДКУ ПУТИ СУДНА 6.1. Задачи на прокладку пути судна с определением места Основные формулы и определения. При наличии в пределах видимости трех ориентиров можно получить
Рис. 6.1 Окружности, внутри которых располагаются данные углы, являются линиями положения судна (изолиниями) в момент наблюдений. Для построения окружности, вмещающей угол a, нужно соединить параметры А и В прямой линией, из середины линии АВ (точки К1) провести перпендикуляр К1О1 и от точки А – прямую АС1 под углом 90° к линии АВ. Точка О1 пересечения линии АС1 с перпендикуляром К1О1 является центром окружности, внутри которой находится угол a. Аналогично строится окружность, вмещающая угол b. Одновременно измеряются углы a и b1 и находится точка пересечения обеих изолиний М, являющаяся местом положения судна. Место судна наносится на карту с помощью протрактора или кальки. Приступая к определению места судна по двум горизонтальным углам, следует помнить, что его определение может оказаться невозможным (случай неопределенности), если судно находится на окружности, проходящей через три выбранных для наблюдения ориентира (рис. 6.2).
Рис. 6.2 Невозможно определить место судна при наличии следующих признаков: – ориентиры А, В и С расположены на одной прямой; – судно находится внутри треугольника, вершинами которого являются наблюдаемые ориентиры А, В и С; – средний ориентир В находится ближе к судну, чем любой из двух крайних; – все три ориентира расположены примерно на одинаковом расстоянии от судна. Для оценки точности места, полученного по двум горизонтальным углам, применяется формула
где D 1, D 2, D 3 – расстояния до ориентира А, В, С соответственно; d 1, d 2 – базовые расстояния АВ и ВС; q – угол пересечения линий положения, равный 360° (a + b + B); m = m a = m b – погрешность измерения горизонтального угла. 6.2. Задачи на прокладку пути судна с определением места судна Основные формулы и определения. Измеренные быстро, последовательно и в установленной очередности компасные пеленги после приведения к одному моменту и исправления с учетом поправки компаса наносятся на карту. В случае возникновения треугольника погрешности со стороной менее 0,5 мили, обсервованное место (точка М) принимается в центре треугольника (рис. 6.3).
Рис. 6.3 При пересечении пеленгов А m 1, В m 3, С m 2 может образоваться треугольник m 1– m 2– m 3 со стороной более 0,5 мили. Необходимо предотвратить его появление, устранив ошибки, возникающие: – при повторных наблюдениях; – в работе одного из навигационных ориентиров; – при пеленговании и прокладке; – при неодновременном измерении пеленгов. Если при повторных измерениях, тщательной обработке пеленгов и прокладке их на карте треугольник погрешности по-прежнему имеет значительные размеры, то причиной его появления является ошибочное значение принимаемой поправки компаса. С целью определения верного значения поправки компаса необходимо "разогнать" ложный треугольник. Для этого требуется увеличить или уменьшить все три пеленга на одинаковую величину ±ε (рис. 6.3) и проложить такие пеленги на карте. Получим новый треугольник погрешностей m 1'– m 2'– m 3'. Соответствующие вершины треугольников соединяем прямыми линиями. Точка пересечения этих линий дает верное обсервованное место судна М (рис. 6.3). Из обсервованной точки М снимаем с карты истинные направления на пеленгуемые ориентиры. Сравнив их с компасными, получаем три поправки компаса. Взяв среднее из них, получаем верное значение поправки компаса. Если учесть склонение, можно получить ксе. девиурацию компаса6.3. Задачи на прокладку пути судна с определением места Комбинированные способы определения места судна основаны Способ определения по пеленгу и горизонтальному углу. Этот способ является частным случаем определения места судна по двум пеленгам и применяется в тех случаях, когда невозможно измерить второй пеленг, так как второй ориентир закрыт. Если известны величины ОИП и горизонтального угла a, рассчитывается второй пеленг ОИП2 = ОИП1 ± a, который и прокладывается на карте (рис. 6.4). Этот способ применяется при условии хорошей погоды, по степени точности его можно считать приблизительно равным определению места посредством измерения двух пеленгов.
Рис. 6.4 Способ определения места судна по двум расстояниям. Измерим расстояния D 1 и D 2 до двух навигационных ориентиров А и В и проложим на карте изолинии (окружности радиусов, равных измеренным расстояниям). Одна из точек пересечения окружностей является местом судна (рис. 6.5).
Рис. 6.5 Счислимое место в момент измерения расстояний или приближенный пеленг одного из ориентиров позволяют решить, какую из этих точек следует принять за обсервованное место судна. Радиальная средняя квадратическая погрешность места судна при mD 1 = mD 2 = mD рассчитывается по формуле M 0 = 1,4 mD cosecθ. При визуальных наблюдениях расстояние до ориентира может быть определено по вертикальному углу, измеренному секстаном:
где h – высота ориентира в метрах, a – величина вертикального угла. Расстояние по вертикальному углу выбирается из табл. 29 МТ-75.
6.3. Задачи на прокладку пути судна с определением места Комбинированные способы определения места судна основаны Способ определения по пеленгу и горизонтальному углу. Этот способ является частным случаем определения места судна по двум пеленгам и применяется в тех случаях, когда невозможно измерить второй пеленг, так как второй ориентир закрыт. Если известны величины ОИП и горизонтального угла a, рассчитывается второй пеленг ОИП2 = ОИП1 ± a, который и прокладывается на карте (рис. 6.4). Этот способ применяется при условии хорошей погоды, по степени точности его можно считать приблизительно равным определению места посредством измерения двух пеленгов.
Рис. 6.4 Способ определения места судна по двум расстояниям. Измерим расстояния D 1 и D 2 до двух навигационных ориентиров А и В и проложим на карте изолинии (окружности радиусов, равных измеренным расстояниям). Одна из точек пересечения окружностей является местом судна (рис. 6.5).
Рис. 6.5 Счислимое место в момент измерения расстояний или приближенный пеленг одного из ориентиров позволяют решить, какую из этих точек следует принять за обсервованное место судна. Радиальная средняя квадратическая погрешность места судна при mD 1 = mD 2 = mD рассчитывается по формуле M 0 = 1,4 mD cosecθ. При визуальных наблюдениях расстояние до ориентира может быть определено по вертикальному углу, измеренному секстаном:
где h – высота ориентира в метрах, a – величина вертикального угла. Расстояние по вертикальному углу выбирается из табл. 29 МТ-75. 6.4. Задачи на прокладку пути судна с определением Способ определения по пеленгу и расстоянию При применении этого способа одновременно измеряют пеленг и расстояние до ориентира. Чтобы получить место судна на карте, нужно исправить компасный пеленг с учетом поправки компаса и проложить обратный истинный пеленг от ориентира А (рис. 6.6). Затем из точки А по линии пеленга в масштабе карты отложить измеренное расстояние. Точка F является искомым местом судна. Для оценки точности места, полученного по пеленгу и расстоянию, применяется формула
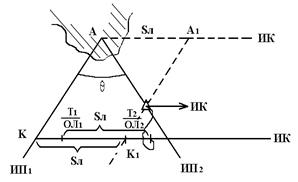
Рис. 6.6 Способ определения по крюйс-пеленгу Если невозможно определить расстояние до ориентира и по одному пеленгу предмета получить место судна, то в этом случае измеряют два пеленга одного и того же предмета через известный промежуток времени и, учитывая перемещение судна за время между пеленгами, графическим построением получают место судна на карте. Такой способ определения называется способом крюйс-пеленга, или счислимо-обсервованным, и на карте обозначается в виде треугольника. Определение места судна по крюйс-пеленгу осуществляем в следующей последовательности: 1. Измеряем первый компасный пеленг нанесенного на карту ориентира и в момент пеленгования отмечаем время Т 1 и отсчет лага ОЛ1. 2. Выждав, когда пеленг на ориентир изменится на 30–70°, вторично измеряем пеленг, отмечаем время Т 2 и отсчет лага ОЛ2. 3. Исправляем компасные пеленги с учетом поправки компаса 4. Рассчитываем пройденное судном расстояние S л за время между измерениями пеленгов. Откладываем S л от точки пересечения первого пеленга с линией ИК и из конца отрезка S л (точка К1) проводим линию, параллельную линии первого пеленга, до пересечения с линией второго пеленга. Точка пересечения является счислимо-обсервованным местом судна (рис. 6.7).
Рис. 6.7 Счислимо-обсервованное место судна можно определить, выполнив построение с использованием ориентира А: 1. От предмета А в сторону движения судна (ИК) откладываем расстояние S л, пройденное судном между пеленгами. 2. Из точки А1 проводим прямую, параллельную ИП1, до пересечения с линией ИП2. Точка пересечения и будет искомым счислимо-обсервованным местом судна. Среднюю квадратическую погрешность обсервованного места определяем по формуле
где q – угол пересечения линий положения; М сч – средняя квадратическая погрешность счисления за промежуток времени между измерениями пеленгов; m п – средняя квадратическая погрешность измерения пеленга; D 1, D 2 – расстояния до ориентира по ИП1 и ИП2.
РАЗДЕЛ 7. ЗАДАЧИ НА ПРОКЛАДКУ ПУТИ СУДНА 7.1. Задачи на прокладку пути судна с определением места Основные формулы и определения. Радиопеленгаторы со слуховым приемом и автоматические визуальные используются для определения величины радиокурсового угла (РКУ) между диаметральной плоскостью судна и направлением распространения радиоволн от радиомаяка. На радиопеленгатор оказывают влияние металлические конструкции, поэтому подвержен девиации и дает искаженное значение направления на радиомаяк. Таким образом, отсчет радиокурсового угла (ОРКУ), полученный непосредственно с лимба радиопеленгатора, следует исправлять с учетом поправки ¦, называемой радиодевиацией: РКУ = ОРКУ + ¦. Если принять Землю за шар, то направление распространения радиоволн будет совпадать с дугой большого круга, которая соединяет место радиомаяка и судно и является кратчайшим расстоянием между двумя точками на шаре. Зная истинный курс судна в момент пеленгования, можно рассчитать пеленг на радиомаяк (рис. 7.1).
Рис. 7.1 Угол между нордовой частью истинного меридиана и направлением распространения радиоволн называют истинным радиопеленгом (ИРП). Этот угол отсчитывается от 0° до 360° по часовой стрелке. Анализ рис. 7.1 свидетельствует о том, что ИРП = ИК + РКУ или ИРП = ГКК + DГК + ОРКУ + ¦. Найденный таким образом ИРП будет ортодромическим пеленгом (ОртП), так как он определяет направление дуги большого круга. Для того чтобы линия пеленга, продолженная на меркаторской карте, прошла через то место, где расположено судно, измеренный ортодромический пеленг должен быть переведен в локсодромический (ЛокП) посредством прибавления к нему ортодромической поправки Y (рис. 7.2), с учетом которой можно исправить кривизну изображения дуги большого круга на меркаторской карте.
Рис. 7.2 Найденное значение Y приведено в табл. 23-а МТ-75 (приложение 17). Аргументами для входа в таблицу служат широта начальной точки ортодромии j1, широта ее конечной точки j2 и разность долгот Dl. Знак ортодромической поправки зависит от взаимного расположения судна и пеленгуемой радиостанции и определяется по правилу: если в северном полушарии 0° < ИРП < 180°, то ортодромическая поправка имеет знак ''+'', если 180° < ИРП < 360°, то ортодромическая поправка имеет знак ''–''. В южном полушарии данное правило будет обратным. Средняя квадратическая радиальная погрешность М 0 рассчитывается
где q – угол пересечения линий положения; m ИРП1, m ИРП2 – средние квадратические погрешности ИРП (на расстояниях до 100 миль Использование в расчетах третьего радиопеленга повышает точность обсервации на 15–20 % и дает возможность контролировать правильность радиопеленгования.РА
[1] Картографические таблицы / Под ред. В.Ф. Соловейкина. М. 1957.
|
|||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2019-04-27; просмотров: 671; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.120.204 (0.004 с.) |

 , значение РД найдем в табл. 25-а МТ-75 по аргументам j m и ОТШ, определим l2 = l1 + РД.
, значение РД найдем в табл. 25-а МТ-75 по аргументам j m и ОТШ, определим l2 = l1 + РД. .
. ' к W,
' к W,
 ,
, морских миль,
морских миль, морских миль
морских миль

 ,
,


 ,
,

 .
.
 ,
,

 ,
,


