
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Поступательное движение звена
Этот вид движения чаще всего относится к ползунам, движущимся относительно прямолинейных направляющих (рис. 5.1). Пусть при этом
Вращательное движение звена В этом движении находятся кривошипы, кулисы, коромысла и другие звенья механизмов. Возьмём стержневое звено ОА (рис. 5.2), вращающееся вокруг неподвижной точки О. Масса звена равна Вычислим ускорение, с которым движется центр масс S. Его нормальное ускорение равно
Угловое ускорение звена вызывает появление инерционного момента (или момента сил инерции), направленного по отношению к нему в противоположную сторону
В этой формуле момент инерции принимается относительно центра вращения и определяется формулой
Частные случаи 1. 3.
Плоско-параллельное движение звена Такое движение совершают чаще всего шатуны механизмов. На рис. 5.3 изображён шатун, совершающий такое движение. Масса шатуна равна
Звено движется, имея угловое ускорение
Общие положения силового расчёта
Принцип Даламбера Силовой расчёт механизмов выполняется на основе принципа Даламбера, позволяющего рассматривать подвижные системы, к которым относятся механизмы, как неподвижные, находящиеся в равновесии. Принцип Даламбера можно сформулировать так: если к системе сил, действующих на подвижную систему, добавить силы инерции, то такую систему можно рассматривать как находящуюся в равновесии, и к ней применимы законы статики. Принцип освобождаемости Если рассматривать механизм в целом, то имеющаяся в каждой кинематической паре, согласно принципу равенства действия и противодействия, пара сил (реакций), действующих по одной линии действия и равных по величине, уравновешивается и на равновесие механизма в целом не влияет. Так что даже в простом механизме определить эти реакции невозможно – они не войдут в уравнения равновесия. Для определения реакций необходимо механизм расчленить на части, каждая из которых была бы статически определима и в которой неизвестные реакции входили бы в число внешних сил и в уравнения равновесия.
|
|||||
|
|
Последнее изменение этой страницы: 2017-02-22; просмотров: 261; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.219.217 (0.003 с.) |
 –это масса ползуна,
–это масса ползуна,  – его ускорение.
– его ускорение. Сила инерции элементарной массы звена
Сила инерции элементарной массы звена  . Если просуммировать все элементарные силы инерции данного ползуна, т. е. найти сумму
. Если просуммировать все элементарные силы инерции данного ползуна, т. е. найти сумму  , то получится главный вектор сил инерции звена, равный
, то получится главный вектор сил инерции звена, равный  . То есть главный вектор сил инерции, или просто сила инерции звена в его поступательном движении равна массе звена, помноженной на его ускорение. Знак «минус» в правой части формулы указывает на противоположность направления силы инерции по отношению к ускорению.
. То есть главный вектор сил инерции, или просто сила инерции звена в его поступательном движении равна массе звена, помноженной на его ускорение. Знак «минус» в правой части формулы указывает на противоположность направления силы инерции по отношению к ускорению. . Вращение происходит с угловой скоростью
. Вращение происходит с угловой скоростью  и угловым ускорением
и угловым ускорением  . Расстояние между центром масс и центром вращения равно
. Расстояние между центром масс и центром вращения равно  .
. , тангенциальное ускорение равно
, тангенциальное ускорение равно  . Так как эти составляющие полного ускорения перпендикулярны друг другу, то полное ускорение равно
. Так как эти составляющие полного ускорения перпендикулярны друг другу, то полное ускорение равно  .
. 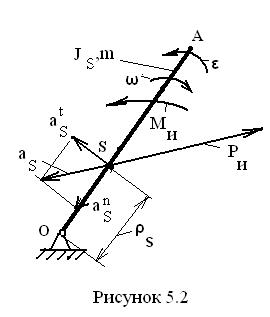 В результате наличия этого ускорения возникает сила инерции, приложенная в центре масс, направленная противоположно ускорению центра масс
В результате наличия этого ускорения возникает сила инерции, приложенная в центре масс, направленная противоположно ускорению центра масс .
. .
. .
. . 2.
. 2.  .
. .
. инерции относительно центра масс равен
инерции относительно центра масс равен  . Аналогично вращательному движению в этом случае также будут действовать оба инерционных фактора: сила инерции
. Аналогично вращательному движению в этом случае также будут действовать оба инерционных фактора: сила инерции  , противоположная ускорению, и момент сил инерции
, противоположная ускорению, и момент сил инерции  , противоположный угловому ускорению.
, противоположный угловому ускорению.


