
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Промышленные регуляторы, их назначение и передаточные функции.Стр 1 из 7Следующая ⇒
Функциональные подсистемы информационно -управляющих систем и их характеристики. Количество обеспечивающих подсистем ни от чего не зависит, а количество функциональных определяется особенностями ПО, а именно: отраслевой принадлежностью, формой собственности, размерами предприятия, характером деятельности предприятия. Порядок разработки ИС: Цель => ФП => ОП Для выделения функциональных подсистем существует 4 принципа: 1. Предметный принцип 2. Функциональный 3. Проблемный 4. Смешанный (предметно-функциональный) С учетом предметного принципа выделяют подсистемы, соответствующие управлению определенными ресурсами (сбыт готовой продукции, управление производством, управление материально-техническим снабжением, управление финансами, управление персоналом и т.п.). Согласно функциональному принципу выделяют подсистемы, реализующие отдельные функции управления (анализ выполнения планов, финансовый анализ, анализ себестоимости продукции, маркетинговый анализ, планирование производства). Формирование подсистем по проблемному принципу происходит для гибкого и оперативного принятие решений по отдельным проблемам (ФП класса СППР) (подсистемы бизнес планирования, управления проектами). На практике как правило чаще всего используется смешанный принцип, согласно которому функциональная структура ИС подразделяется на подсистемы по характеру хозяйственной деятельности. Подсистемы, построенные по функциональному принципу, охватывают обычно все виды хозяйственной деятельности (сбыт, производство, снабжение, персонал, финансы). Подсистемы, которые строятся по предметному принципу, относятся к оперативному управлению ресурсами. Функциональная подсистема ИС представляет собой комплекс задач с высокой степенью информационных обменов (связей) между задачами. При этом под задачей будем понимать некоторый процесс обработки информации с чётко определенным множеством входной и выходной информации (например, начисление сдельной заработной платы, учёт прихода материалов, оформление заказа на закупку и т.д.). Состав функциональных подсистем во многом определяется особенностями системы, ее отраслевой принадлежностью, формой собственности, размером, характером деятельности предприятия.
Функциональные подсистемы ИС могут строиться по различным принципам: предметному, функциональному, проблемному, смешанному (предметно-функциональному). Так, с учетом предметной направленности использования ИС в хозяйственных процессах промышленного предприятия выделяют подсистемы, соответствующие управлению отдельными ресурсами: • управление сбытом готовой продукции;• управление производством; • управление материально-техническим снабжением; • управление финансами; • управление персоналом. При этом в подсистемах рассматривается решение задач на всех уровнях управления, обеспечивая интеграцию информационных потоков по вертикали. Для реализации функций управления выделяют следующие подсистемы: • планирование;• регулирование (оперативное управление);• учет;• анализ.
Теорема. Пусть (x*(t), u*(t)) – оптимальный процесс в задаче оптимального управления (5-7). Тогда существует вектор функция y(t)= (y1(t), y2(t), …, yn(t)), удовлетворяющая вместе с данным процессом следующим условиям: Функция 1. Переменные y(t) удовлетворяют системе дифференциальных уравнений
1. В конечный момент времени t=T оптимальная траектория удовлетворяет условиям
Примеры
Для таблицы T запрос SELECT * FROM T; вернёт все столбцы всех строк данной таблицы. Для той же таблицы запрос SELECT C1 FROM T; вернёт значения столбца C1 всех строк таблицы— в терминах реляционной алгебры можно сказать, что была выполнена проекция. Для той же таблицы запрос SELECT * FROM T WHERE C1 = 1; вернёт значения всех столбцов всех строк таблицы, у которых значение поля C1 равно '1'— в терминах реляционной алгебры можно сказать, что была выполнена выборка, так как присутствует ключевое слово WHERE. Последний запрос
SELECT * FROM T ORDER BY C1 DESC; вернёт те же строки, что и первый, однако результат будет отсортирован в обратном порядке (Z-A) из-за использования ключевого слова ORDER BY с полем C1 в качестве поля сортировки. Этот запрос не содержит ключевого слова WHERE, поэтому он вернёт всё, что есть в таблице. Несколько элементов ORDER BY могут быть указаны разделённые запятыми [напр. ORDER BY C1 ASC, C2 DESC] для более точной сортировки. Отбирает все строки где поле column_name равен одному из перечисленных значений value1,value2,… SELECT * FROM table_name WHERE column_name IN (value1,value2,...) Ограничение возвращаемых строк. Согласно ISO SQL:2003 возвращаемый набор данных может быть ограничен с помощью: курсоров, или введением оконных функций в оператор SELECT Оконная функция ROW_NUMBER() Существуют различные оконные функции. ROW_NUMBER() OVER может быть использована для простого ограничения числа возвращаемых строк. Например, для возврата не более десяти строк: SELECT * FROM ( SELECT ROW_NUMBER() OVER (ORDER BY key ASC) AS rownumber, columns FROM tablename ) AS foo WHERE rownumber <= 10 ROW_NUMBER может быть недетерминированным: если key не уникален, каждый раз при выполнении запроса возможно присвоение разных номеров строкам, у которых key совпадает. Когда key уникален, каждая строка будет всегда получать уникальный номер строки. Оконная функция RANK() Функция RANK() OVER работает почти так же, как ROW_NUMBER, но может вернуть более чем n строк при определённых условиях. Например, для получения top-10 самых молодых людей: SELECT * FROM ( SELECT RANK() OVER (ORDER BY age ASC) AS ranking, person_id, person_name, age FROM person ) AS foo WHERE ranking <= 10 Данный код может вернуть более чем 10 строк. Например, если есть два человека с одинаковым возрастом, он вернёт 11 строк.
54. Типы команд и разновидности адресации в микропроцессорах. CISC, RISC и VLIW процессоры: Микропроцессоры. Микропроце́ссор — процессор (устройство, отвечающее за выполнение арифметических, логических операций и операций управления, записанных в машинном коде), реализованный в виде одной микросхемы или комплекта из нескольких специализированных микросхем (в противоположность реализации процессора в виде электрической схемы на элементной базе общего назначения или в виде программной модели). Первые микропроцессоры появились в 1970-х и применялись в электронных калькуляторах, в них использовалась двоично-десятичная арифметика 4-х битных слов. Вскоре их стали встраивать и в другие устройства, например терминалы, принтеры и различную автоматику. Доступные 8-битные микропроцессоры с 16-битной адресацией позволили в середине 1970-х создать первые бытовые микрокомпьютеры. Микропроцессоры типа CISC. Микропроцессор CISC использует набор машинных инструкций, полностью соответствующий набору команд языка ассемблера. Вычисления разного типа в нем могут выполняться различными командами, даже если они приводят к одному результату (например, умножение на два и сдвиг на один разряд влево). Такая архитектура обеспечивает разнообразные и мощные способы выполнения вычислительных операций на уровне машинных команд, но для выполнения каждой команды обычно требуется большое число тактов процессора. Для CISC-процессоров характерно: сравнительно небольшое число регистров общего назначения;
Эти недостатки обусловили необходимость разработки альтернативной архитектуры, нацеленной, прежде всего, на снижение нерегулярности потока команд уменьшением их общего количества. Это было реализовано в RISC-процессорах, название которых означает “чипы с сокращённой системой команд” (Reduced Instruction Set Computer). Микропроцессоры типа RISC. Микропроцессоры с архитектурой RISC (Reduced Instruction Set Computers) используют сравнительно небольшой (сокращённый) набор наиболее употребимых команд, определённый в результате статистического анализа большого числа программ для основных областей применения CISC (Complex Instruction Set Computer)- процессоров исходной архитектуры. Все команды работают с операндами и имеют одинаковый формат. Обращение к памяти выполняется с помощью специальных команд загрузки регистра и записи. Простота структуры и небольшой набор команд позволяет реализовать полностью их аппаратное выполнение и эффективный конвейер при небольшом объеме оборудования. Арифметику RISC - процессоров отличает высокая степень дробления конвейера. Этот прием позволяет увеличить тактовую частоту (значит, и производительность) компьютера; чем более элементарные действия выполняются в каждой фазе работы конвейера, тем выше частота его работы. RISC - процессоры с самого начала ориентированны на реализацию всех возможностей ускорения арифметических операций, поэтому их конвейеры обладают значительно более высоким быстродействием, чем в CISC - процессорах. Поэтому RISC - процессоры в 2 - 4 раза быстрее имеющих ту же тактовую частоту CISC - процессоров с обычной системой команд и высокопроизводительней, несмотря на больший объем программ, на (30 %). Дейв Паттерсон и Карло Секуин сформулировали 4 основных принципа RISC: 1. Любая операция должна выполняться за один такт, вне зависимости от ее типа.
VLIW. В попытке достижения компромисса между CISC и RISC были созданы микропроцессоры типа VLIW. Хотя идеи VLIW сформулированы уже давно, до настоящего времени они были известны в основном специалистам в области компьютерных архитектур. Имеющиеся реализации, например, VLIW Multiflow, не получили широкого распространения. Пожалуй, единственными популярными процессорами, архитектура которых близка к VLIW, была линия AP-120B/FPS-164/FPS-264 компании Floating Point Systems, которые в 80-е годы активно применялись при проведении научно-технических расчетов. Команда в этих системах содержала ряд полей, каждое из которых управляло работой отдельного блока процессора, так что все командное слово определяло поведение всех блоков процессора [5]. Однако длина команды в FPS-х64 была равна всего 64 разрядам, что по современным меркам никак нельзя отнести к сверхбольшим. Выделение в архитектуре VLIW компонентов командного слова, управляющих отдельными блоками МП, вводит явный параллелизм на уровень команд. Задача обеспечения эффективного распараллеливания работы отдельных блоков возлагается при этом на компилятор, который должен сгенерировать машинные команды, содержащие явные указания на одновременное исполнение операций в разных блоках. Таким образом, достижение параллелизма, обеспечиваемое в современных суперскалярных RISC-процессоров их аппаратурой, в VLIW возлагается на компилятор. Очевидно, что это вызывает сложные проблемы разработки соответствующих компиляторов. При этом распараллеливание работы между ФУ в EPIC происходит статически при компиляции, в то время как современные суперскалярные RISC-процессоры осуществляют это динамически.
55. Понятие области нормальных режимов регулятора (ОНР) и области допустимых настроек регулятора (ОДН): Областью нормальных режимов регулятора называют область таких амплитуд и частот входного сигнала и настроечных параметров регулятора, в пределах которой частотные характеристики реального регулятора отличаются от частотных характеристик идеального регулятора не более чем на некоторую заданную величину по модулю и по фазе.
При выборе типа регулятора требуется соответствие его динамических характеристик и объекта. Динамические характеристики регулятора зависят от его настройки, которая осуществляется специальными устройствами на основании расчета (коэффициентов в уравнениях), призванного обеспечить минимизацию критериев качества регулирования. Параметры настройки регуляторов различных типов представлены в табл. 13.3. Коэффициент передачи Кр для всех регуляторов, кроме И-регулятора, определяется отношением доли (в процентах) хода регулирующего органа к единице регулируемой величины (у И-регулятора в знаменатель еще входит время, с). Для расчета параметров настройки типовых промышленных объектов пользуются номограммами и эмпирическими формулами. Пример расчета для двух видов переходных процессов в объекте с саморегулированием приведен в табл. 13.4, где Ко — коэффициент передачи объекта; Tz — его динамическая постоянная; т — запаздывание; а' — квадратическая оценка качества регулирования (см. параграф 13.6J. Табл. 13.3. Динамические настройки регуляторов Табл. 13.4. Оптимальные параметры настройки регуляторов
После расчета проверяют, находятся ли параметры в области нормальных режимов (ОНР). На рис. 13.21 показана ОНР, построенная для ПИ-регулятора, и переходные процессы 1...3 с разными Яр, из которых процесс 2 выходит за пределы ОНР. Регулятор необходимо перенастроить. Следует правильно применять термины «регулирование» и «регулировка». Регулировка — эпизодическое или ± кР 0,2 о,1
10 20 30 40 Ты.С Рис. 13.21 периодическое вмешательство человека в работу установки с целью настройки, наладки, обычно в ходе монтажа, опробования или испытаний. Балансировка колеса вентилятора — регулировка, изменение частоты вращения для обеспечения заданного расхода — регулирование, т. е. воздействие на режим работы.
Элемент «И» (AND)
Для того, чтобы понять как он работает, нужно нарисовать таблицу, в которой будут перечислены состояния на выходе при любой комбинации входных сигналов. Такая таблица называется «таблица истинности». Таблицы истинности широко применяются в цифровой технике для описания работы логических схем. Вот так выглядит элемент «И» и его таблица истинности: Поскольку вам придется общаться как с русской, так и с буржуйской тех. документацией, я буду приводить условные графические обозначения (УГО) элементов и по нашим и по не нашим стандартам. Смотрим таблицу истинности, и проясняем в мозгу принцип. Понять его не сложно: единица на выходе элемента «И» возникает только тогда, когда на оба входа поданы единицы. Это объясняет название элемента: единицы должны быть И на одном, И на другом входе.
Элемент «ИЛИ» (OR) По другому, его зовут «дизъюнктор». Любуемся: Опять же, название говорит само за себя. На выходе возникает единица, когда на один ИЛИ на другой ИЛИ на оба сразу входа подана единица. Этот элемент можно назвать также элементом «И» для негативной логики: ноль на его выходе бывает только в том случае, если и на один и на второй вход поданы нули. Едем дальше. Дальше у нас очень простенький, но очень необходимый элемент. Элемент «НЕ» (NOT)
Надо чего-нибудь говорить по поводу его работы? Ну тогда поехали дальше. Следующие два элемента получаются путем установки инвертора на выход элементов «И» и «ИЛИ». Элемент «И-НЕ» (NAND)
Элемент «ИЛИ-НЕ» (NOR)
Следующий товарищ устроен несколько хитрее: Свойства транзакций Все транзакции должны обладать следующими четырьмя свойствами (известными как свойства АСИД): Атомарность (Atomicity). Транзакция либо фиксирует результат своей операции, либо возвращает всё на место. Если транзакция выполняется успешно, результат транзакции фиксируется. Если по какой-то причине транзакция не удалась, объекты, над которыми осуществлялась операция, возвращаются в исходное состояние. Согласованность (Consistency). Транзакция вызывает корректную трансформацию системы, при этом сохраняя её состояние. Например, в рамках транзактного добавления одного элемента в двусвязный список, все четыре указателя в ту и в другую сторону обновляются одновременно. Изолированность (Isolation). Выполняющиеся одновременно транзакции изолированы от воздействия незавершившихся транзакций. Данная характеристика также именуется как сериализуемость (serializability). Например, транзакция, проходящая через двусвязный список, который в это время подвергается изменению предыдущей транзакцией, будет видеть только те изменения, которые уже осуществились до её инициализации. Изменения же, осуществляемые предыдущей транзакцией, после запуска этой транзакции, уже никак не могут повлиять на неё. Долговечность или устойчивость (Durability). Если транзакция завершилась успешно, её результат будет зафиксирован и сохранён. Более того, в этом случае результат сохранится даже при опасности возникновения сбоя системы. Промышленные регуляторы, их назначение и передаточные функции. Автоматическим регулятором – называется комплекс устройств, воспринимающий и суммирующий информацию от датчиков и задатчика, формирующий заданный закон регулирования и оказывающий воздействия на объект регулирования, обеспечивающее необходимое качество регулирования. Классификация регуляторов. По виду и способу использования энергии для регулирования регуляторы делятся на регуляторы прямого и непрямого действия. Регуляторы непрямого действия по виду потребляемой энергии подразделяются на электрические, пневматические, гидравлические и комбинированные. По виду задающей программы регуляторы подразделяются на регуляторы постоянного параметра, которые поддерживают регулируемую величину на заданном постоянном уровне, программные регуляторы, которые изменяют регулируемую величину по наперед заданной программе, следящие системы. По характеру изменения регулирующего воздействия во времени различают регуляторы непрерывного и прерывистого действия. Регуляторы прерывистые в свою очередь делятся на релейные, импульсные и цифровые. По структуре регуляторы могут быть приборными и аппаратными. Для того, чтобы система автоматического была устойчивой и обеспечивала необходимое качество регулирования, регулятор должен обладать определенными динамическими характеристиками, которые могут быть описаны дифференциальными уравнениями, связывающими выходную и входную величины. Эти зависимости носят название законов регулирования, или алгоритмов регулирования. Для выполнения требуемых законов регулирования автоматические регуляторы должны содержать так называемые корректирующие устройства, с помощью которых можно изменять в нужном направлении их динамические характеристики. Для того, чтобы серийное производство регуляторов стало реальным, все многообразие законов регулирования было сгруппировано по сходным признакам. Унификация законов регулирования позволила осуществить унификацию конструкций регуляторов. Регуляторы каждой группы имеют теперь одни и те же конструктивные элементы и отличаются только положением органов. Длительный опыт автоматизации ведущих отраслей промышленности убедительно показал, что подавляющее большинство задач по автоматическому регулированию могут быть решены регуляторами со следующими четырьмя линейными унифицированными законами регулирования: пропорциональным, интегральным, пропорционально-интегральным, пропорционально – интегрально - дифференциальным. П - регуляторы. П – регуляторы производят перемещение регулирующего органа пропорционально отклонению регулируемой величины от заданного значения. П – регулятор в динамическом отношении подобен безынерционному звену, передаточная функция, АФ и временная характеристики которого определяются формулами:
В графической форме АФХ П – регулятора представляет собой отрезок прямой длины
Коэффициент усиления регулятора П - регуляторы позволяют устойчиво регулировать работу большинства промышленных регулируемых объектов. Однако они обладают тем недостатком, что при различных нагрузках регулируемого объекта регулируемая величина удерживается регулятором на различных значениях. Объясняется это тем, что перемещение регулирующего органа в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Это явление получило название остаточной неравномерности регулирования или статизма
И – регуляторы. И- регуляторы перемещают регулирующий орган пропорционально интегралу от отклонения регулируемой величины. Т.е. И – регуляторы перемещают регулирующий орган со скоростью, пропорциональной отклонению регулируемой величины от ее заданного значения. Иногда интегральные регуляторы называют астатическими, так как в системе регулирования с этими регуляторами отсутствует статическая ошибка. Это определение менее точно ввиду того, что и некоторые другие типы регуляторов обеспечивают в системах отсутствие статической ошибки.
На комплексной плоскости АФХ изображается в виде прямой, совпадающей с отрицательной частью мнимой оси (рис.3.8). Величина угла сдвига фаз интегрального регулятора составляет -900. Для получения выражения для временной характеристики найдем предварительно изображение регулирующего воздействия при скачкообразном возмущении.
ПИ – регуляторы. ПИ – регулятором называют пропорциональный регулятор с введением в закон регулирования интеграла. ПИ – регулятор производит перемещение регулирующего органа пропорционально отклонению и интегралу от отклонения регулируемой величины. Уравнение идеального ПИ – регулятора:
Т.е. скорость перемещения регулирующего органа пропорциональна отклонению скорости изменения регулируемой величины. ПИ – регуляторы имеют два регулируемых динамических параметра, которые используются в качестве настроечных параметров. Это В динамическом отношении ПИ – регулятор подобен двум включенным параллельно звеньям: безынерционному с коэффициентом усиления При беспредельном увеличении времени интегрирования Передаточную функцию и АФХ идеального ПИ – регулятора легко получить из уравнения (3.4)
Уравнение временной характеристики можно получить с помощью обратного преобразования Лапласа, используя формулу (3.6.) для предаточной функции:
Где Построенная по этому уравнению временная характеристика ПИ - регулятора приведена на рис 3.11. Она состоит из двух частей. Отрезок
ПИД – регуляторы. ПИД – регулятором, называется регулятор, производящий перемещение регулирующего органа пропорционально отклонению, интегралу от отклонения и скорости изменения регулируемой величины, т.е. ПИД – регулятор вводит в закон регулирования интеграл и производную от регулируемой величины. Идеальный ПИД – регулятор описывается следующим уравнением: Применив к уравнению (3.7) преобразование Лапласа, можно найти передаточную функцию ПИД – регулятора, а также его АФХ (рис.3.12)
Уравнение временной характеристики идеального ПИД – регулятора состоит из двух частей:
Действительно, в момент действия на вход регулятора скачкообразного сигнала последний член уравнения (3.7) стремится к бесконечности. При t>0, когда входной сигнал сохраняет неизменное значение, член, содержащий производную от отклонения (входного сигнала), равен 0, и переходная функция становится аналогичной функции ПИ – регулятора.
Применение промышленных регуляторов обычно предполагает, что при работе в реальных условиях эти регуляторы ведут себя как идеальные.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-21; просмотров: 367; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.142.197.212 (0.1 с.) |
 достигает максимума значения по u при x=x*(t), y(t) на значении u=u*(t) при всех tÎ[0;T] (10)
достигает максимума значения по u при x=x*(t), y(t) на значении u=u*(t) при всех tÎ[0;T] (10) i=1, 2, …, n,
i=1, 2, …, n,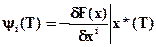 i=m+1, m+2, …, n, где m – переменные Таким образом, система управлений может быть записана в форме
i=m+1, m+2, …, n, где m – переменные Таким образом, система управлений может быть записана в форме 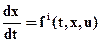 ;
;  i=1, 2, …, n.
i=1, 2, …, n. Иначе его называют «конъюнктор».
Иначе его называют «конъюнктор». Если посмотреть чуток иначе, то можно сказать так: на выходе элемента «И» будет ноль в том случае, если хотя бы на один из его входов подан ноль. Запоминаем. Идем дальше.
Если посмотреть чуток иначе, то можно сказать так: на выходе элемента «И» будет ноль в том случае, если хотя бы на один из его входов подан ноль. Запоминаем. Идем дальше. Чаще, его называют «инвертор».
Чаще, его называют «инвертор».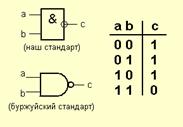
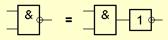 Элемент И-НЕ работает точно так же как «И», только выходной сигнал полностью противоположен. Там где у элемента «И» на выходе должен быть «0», у элемента «И-НЕ» - единица. И наоборот. Э то легко понять по эквивалентной схеме элемента:
Элемент И-НЕ работает точно так же как «И», только выходной сигнал полностью противоположен. Там где у элемента «И» на выходе должен быть «0», у элемента «И-НЕ» - единица. И наоборот. Э то легко понять по эквивалентной схеме элемента: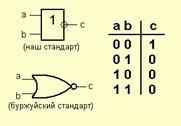 Та же история – элемент «ИЛИ» с инвертором на выходе.
Та же история – элемент «ИЛИ» с инвертором на выходе. Коэффициент
Коэффициент  называется коэффициентом усиления регулятора.
называется коэффициентом усиления регулятора.
 Для определения АФХ регулятора на его вход подается возмущение синусоидальной формы
Для определения АФХ регулятора на его вход подается возмущение синусоидальной формы  (рис.3.5.) Выходной сигнал регулятора также будет иметь синусоидальную форму
(рис.3.5.) Выходной сигнал регулятора также будет иметь синусоидальную форму  , однако амплитуда и фаза выходного сигнала в общем случае будут зависеть от частоты. Для П – регулятора амплитуда выходного сигнала не зависит от частоты и будет
, однако амплитуда и фаза выходного сигнала в общем случае будут зависеть от частоты. Для П – регулятора амплитуда выходного сигнала не зависит от частоты и будет  , а фазы входного и выходного сигналов совпадут.
, а фазы входного и выходного сигналов совпадут. , отложенный по оси абсцисс комплексной плоскости вправо от начала координат (рис.3.6)
, отложенный по оси абсцисс комплексной плоскости вправо от начала координат (рис.3.6)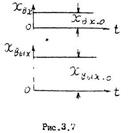 Временная характеристика
Временная характеристика  или характеристика разгона представляет собой реакцию регулятора на скачкообразное возмущение (рис.3.7).
или характеристика разгона представляет собой реакцию регулятора на скачкообразное возмущение (рис.3.7).
 (3.2.) Этот закон может быть также записан в следующем виде:
(3.2.) Этот закон может быть также записан в следующем виде: 

 И – регуляторы также как и П – регуляторы имеют один параметр динамической настройки
И – регуляторы также как и П – регуляторы имеют один параметр динамической настройки  . Коэффициент
. Коэффициент  носит название приведенной скорости регулирования или скорости разгона. В динамическом отношении И - регулятор подобен интегрирующему звену. Его передаточная функция и АФХ определяются формулами:
носит название приведенной скорости регулирования или скорости разгона. В динамическом отношении И - регулятор подобен интегрирующему звену. Его передаточная функция и АФХ определяются формулами: Оригинал этого изображения дает временную характеристику
Оригинал этого изображения дает временную характеристику 
 Если на вход регулятора подается единичное скачкообразное возмущение, то временная характеристика И – регулятора запишется так:
Если на вход регулятора подается единичное скачкообразное возмущение, то временная характеристика И – регулятора запишется так:  Построим временную характеристику, совместив на одном графике
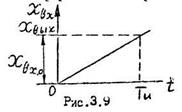
Построим временную характеристику, совместив на одном графике  . Тогда время интегрирования Ти И - регулятора, являющейся обратной величиной приведенной скорости регулирования
. Тогда время интегрирования Ти И - регулятора, являющейся обратной величиной приведенной скорости регулирования  , можно определить, как время, в течении которого изменение регулирующего воздействия достигнет величины, равной входному скачкообразному воздействию (рис.3.9)
, можно определить, как время, в течении которого изменение регулирующего воздействия достигнет величины, равной входному скачкообразному воздействию (рис.3.9)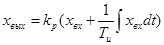 (3.4) Эта формула может быть представлена также в другом виде:
(3.4) Эта формула может быть представлена также в другом виде: 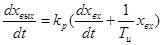
 - постоянная времени интегрирования, величина которой характеризует степень ввода в закон регулирования интеграла. Этот параметр называют иногда временем «изодрома» или временем «удвоения», так как
- постоянная времени интегрирования, величина которой характеризует степень ввода в закон регулирования интеграла. Этот параметр называют иногда временем «изодрома» или временем «удвоения», так как  регулятора при скачкообразном возмущении достигает своего удвоенного значения (рис.3.9)
регулятора при скачкообразном возмущении достигает своего удвоенного значения (рис.3.9)

 На комплексной плоскости АФХ ПИ – регулятора можно изобразить в идее прямой, идущей из бесконечности параллельно мнимой оси (рис.3.10) на расстоянии -
На комплексной плоскости АФХ ПИ – регулятора можно изобразить в идее прямой, идущей из бесконечности параллельно мнимой оси (рис.3.10) на расстоянии -  отсюда
отсюда  (3.6)
(3.6) -- скачкообразное возмущение.
-- скачкообразное возмущение. , тогда
, тогда 
 (3.7)
(3.7)  - постоянная времени диффенцирования или время предварения. Коэффициент усиления
- постоянная времени диффенцирования или время предварения. Коэффициент усиления  являются тремя динамическими параметрами ПИД – регулятора, используемыми в качестве настроечных параметров.
являются тремя динамическими параметрами ПИД – регулятора, используемыми в качестве настроечных параметров.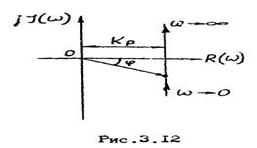
 Графически АФХ ПИД – регулятора изображается в виде прямой, параллельной мнимой оси комплексной плоскости, и расположенной на расстоянии
Графически АФХ ПИД – регулятора изображается в виде прямой, параллельной мнимой оси комплексной плоскости, и расположенной на расстоянии  , прямая уходит в
, прямая уходит в  , а при
, а при  , в
, в  . Фазовый угол ПИД – регулятора может изменяться в пределах от +900 до -900. Получим уравнение временной характеристики:
. Фазовый угол ПИД – регулятора может изменяться в пределах от +900 до -900. Получим уравнение временной характеристики: Но для скачка
Но для скачка  отсюда
отсюда 


 (3.9)
(3.9)
 Реальные регуляторы
Реальные регуляторы


