Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет точности остановки кабины ⇐ ПредыдущаяСтр 3 из 3
Точностью остановки кабины называется полуразность тормозных путей груженой и пустой кабины, т.е.
где Величина
где mп - приведенная к кабине масса всех поступательно и вращательно движущихся частей лифта; V - скорость кабины; W0 - статическое окружное усилие на шкиве в рабочем режиме; Wт- тормозное усилие тормоза, приведенное к окружности шкива; S - тормозной путь кабины. Знак перед статическим окружным усилием зависит от направления движения и загрузки кабины. Приведенная к кабине масса всех поступательно и вращательно движущихся частей лифта может быть определена по формуле:
где GDл2- маховой момент вращающихся элементов лебедки, приведенной к валу двигателя, H·м2; i - передаточное отношение лебедки; D - диаметр шкива. Маховой момент вращающихся элементов лебедки, приведенный к валу двигателя, можно определить по формуле:
где Rн = 1,1...1,2 - коэффициент, учитывающий маховые моменты вращающихся деталей редуктора и шкива; GDя2 - маховой момент якоря двигателя; GDT2 - маховой момент тормозной муфты.
Тормозное усилие тормоза, приведенное к окружности канатоведущего шкива, определяется по формуле:
где МТ - тормозной момент на валу двигателя.
Из уравнения можно определить величину тормозного пути для всех четырех случаев торможения:
Найденные значения тормозного пути подставляем в формулу и определяем точность остановки кабины. Полученное значение точности остановки кабины не превышает норм ±50 мм [4].
5.3. Ловители
Рис.4. Принципиальная схема взаимодействия ограничителя скорости и ловителей Шкив ограничителя скорости 4 огибается канатом 5 ограничителя скорости. В приямке шахты установлен натяжной блок 1. К канату 5 присоединен рычаг 6, который шарнирно укреплен на каркасе кабины 8. Кабина висит на подъемных канатах 7 и при своем движении тянет за собой канат 5, который, в свою очередь, вращает шкив ограничителя скорости 4, Таким образом, окружная частота вращения шкива ограничителя скорости равна скорости движения кабины.
Конструкция плоского ограничителя скорости типа ОС-2 представлена на рис. 5. В неподвижном корпусе на оси установлен сдвоенный шкив 1, получающий вращение от каната ограничителя скорости, связанного с кабиной. На шкиве шарнирно закреплены рычаги-грузы 5, соединенные между собой тягой 3, на которую надета сжатая пружина 4. Усилие сжатия пружины регулируется гайкой.
Рис.5. Конструкция плоского ограничителя скорости типа ОС-2 Движущаяся кабина тянет за собой канат ограничителя скорости, который, в свою очередь, вращает шкив 1 вместе с рычагами 5. При аварийной скорости движения кабины рычаги 5 под действием центробежной силы отклоняются и входят в зацепление с неподвижными упорами 2, установленными в корпусе ограничителя скорости. В результате этого шкив останавливается, а канат ограничителя скорости, увлекаемый кабиной, скользит по неподвижному шкиву. Возникающая при этом сила трения приводит r действие привод ловителей. Величина скорости, при которой срабатывает ограничитель скорости, зависит от усилия пружины 4; чем больше предварительное сжатие пружины, тем большая потребуется центробежная сила для разведения рычагов грузов, и, следовательно, большая скорость вращения шкива. Ловители должны удерживать кабину направляющих при ее движении вниз случае увеличения скорости движения кабины до величины 1,4V (V – номинальная скорость лифта). Ловители должны быть рассчитаны на удержание кабины с нагрузкой, соответствующей свободному падению, в случае обрыва тяговых канатов при скорости 1,4V. Максимальная величина ускорения (замедления) при посадке кабины ловителя не должна превышать 25 м/сек2. Допускается превышение этой величины, если время действия превышения не более 0,04 сек.. В рассмотрим ловители плавного торможения с постоянным усилием – клещевой №3 ОСТ 22-127-71 С127600-01, для таких ловителей регламентируют тормозные пути: [Smin] = мм – минимальный путь торможения порожней кабины; [Smax] = мм – максимальный путь торможения кабины с грузом.
Рис.6. Схема клещевого ловителя с постоянным тормозным усилием.
Оба рычага 4 соединены в хвостовой части штоком 1 на котором установлена сжатая пружина 2 Усилие сжатия пружины регулируется гайкой 3. Рабочая часть клещей состоит из башмака 5 ловителя и клина 7, которые охватывают направляющую 6. На тыльной стороне клина установлена роликовая обойма 8. Подъем клина до соприкосновения производится с направляющей тягой 9. Усилие прижатия клина 7 и башмака 5 к направляющей, а, следовательно, и тормозное усилие остаются постоянными в процессе всего торможения и определяются величиной предварительного сжатия пружины 2.
5.4 Расчёт клещевого ловителя. l1 = мм, l2 = мм, P2 = кг – рабочее усилие пружин (в конце хода клина). Тормозное усилие одного ловителя R1 = P2 · l2/l1 · m ·μ = кг, m = 2 – число поверхностей трения в одном ловителе; μ = 0,14 – коэффициент трения колодок ловителей о направляющую.
Рис.7. Расчётная схема клещевого ловителя
Расчетное отклонение тормозного усилия для применяемой конструкции ловителей принимаются 12%. R1max = R1 · 1,12, R1min = R1 · 0,88. Общее тормозное усилие ловителей Rmax = 2 · R1max, Rmin = 2 · R1min. Расчетный вес улавливаемых масс кабины (расчетный вариант – лифт с максимальной высотой подъема при максимальном весе подвесного кабеля) Gmax = Qk + Qсв + Qкаб кг; Gн = Qк + Q +QGкаб ; Gp = Gk + 0,5Qcв кг; Qк =1600 кг; Qсв =6300·0,7- вес груза по свободному заполнению; Qкаб max =105 кг – вес кабеля; Ускорение при посадке на ловители:
Тормозной путь кабины определяется по формуле (расчетный случай “АЛО”). S = V2p/2 · a, Где Vp = 1,4· V м/сек – расчетная скорость в начале посадки на ловители. Тормозной путь кабины с номинальным грузом
Рассчитываемый механизм должен обеспечивать: Срабатывание ловителей при срабатывании ограничителя скорости. Несрабатывание ловителей при пуске лифта. В настоящем механизме шкив ограничителя скорости приводится в движение за счет сил трения от приводного каната, поэтому должно быть обеспечено отсутствие проскальзывания приводного каната по шкиву в режимах, предшествующих срабатыванию ограничителя скорости. Расчет буфера Выбираем для лифта гидравлический плунжерный буфер. Гидравлические буфера относятся к устройствам рассеивающего типа, поэтому широко используются в лифтах при любых скоростях, начиная с 1,4 м/с. Замедление кабины (противовеса) происходит за счет сил сопротивления перетеканию жидкости через отверстия линейно уменьшающейся площади. Конструкция гидробуфера обеспечивает постоянство тормозной силы и ускорения замедления, равное g, на всем пути замедления. Применяются два способа изменения площади отверстий при регулировании величины сопротивления истечению жидкости: с изменяющимся кольцевым отверстием и с изменением количества калиброванных отверстий, через которые перетекает жидкость. На рис. 8 представлена отечественная конструкция гидробуфера с изменяющейся площадью кольцевого отверстия. Основу конструкции буфера составляет корпус цилиндрической формы с радиальными отверстиями в верхней части, соединяющими его с масляной емкостью 9. В нижней части корпуса гайками 1 закреплен шток конической формы. Для предотвращения утечки масла предусмотрена втулка 2 с уплотнением. В верхней части штока установлена фасонная шайба 6 с радиальными отверстиями для прохода масла. В верхней части корпуса с помощью гайки 12 установлена втулка 11 с уплотнениями, предотвращающими утечку масла. Втулка гидроцилиндра 11 является направляющей для плунжера 15. При монтаже буфера должны быть совмещены радиальные отверстия корпуса и втулки 11.
Верхняя часть плунжера перекрыта торцевой шайбой 18, на которой установлен амортизатор 20. В нижней части корпуса смонтировано контактное устройство 7, предназначенное для контроля возврата плунжера в верхнее исходное положение. Возврат плунжера в исходное состояние производится пружиной 13. В исходном положении плунжер под действием пружины 13 занимает крайнее верхнее положение. Кронштейн с цепью 8 удерживают контактное устройство 7 в положении «включено». Уровень масла должен находится в промежутке между верхней и нижней рисками щупа 21. При посадке кабины (противовеса) на буфер, благодаря деформации амортизатора 20, происходит плавное увеличение скорости плунжера 15 от неподвижного состояния до скорости кабины.
Рис.8. Гидравлический буфер с изменяющейся площадью кольцевого отверстия: Гайка; 2 – уплотнение; 3, 20 – амортизаторы; 4 – шток; 5 – корпус; 6 – шайба фасонная; 7 – контактное устройство, 8 – цепь (или канатик); 9 – емкость для масла; 10, 16 – кольца; 11 – втулка гидроцилиндра; 12 – гайка фасонная; 13 – пружина; 14 – чехол, 15 – плунжер, 17 – кольцо пружинное; 18 – шайба торцевая; 19 – кронштейн; 21 – линейка, 22 – пробка сливная Плунжер вместе с кабиной перемещается вниз, выжимая масло через радиальные отверстия корпуса в масляную емкость 9. В дальнейшем, радиальные отверстия перекрываются плунжером и масло перетекает через уменьшающийся кольцевой зазор во внутреннюю полость плунжера. Кронштейн 19, опускаясь вместе с плунжером, ослабляет натяжения цепи 8 и контактное устройство 7 переходит в состояние «выключено», отключая привод лебедки лифта. Кольцевой зазор уменьшается за счет конической формы штока 4 и становится равным нулю в конце хода плунжера, когда его торцевая часть достигнет амортизатора 3 и остановится. Процесс посадки на буфер заканчивается. Торможение обеспечивается за счет сопротивления истечения жидкости через постепенно уменьшающийся кольцевой зазор. Поэтому при падающей скорости движения плунжера и росте величины коэффициента сопротивления истечению, тормозная сила остается величиной постоянной.
После устранения нарушений, кабина снимается с буфера и плунжер 15 возвращается в верхнее исходное положение пружиной 13. Контактное устройство 7 переходит в состояние «включено», если кронштейн 19 достигнет предельного верхнего положения. Буферы подобного типа изготавливаются с укороченным и увеличенным рабочим ходом плунжера в зависимости от расчетной скорости посадки на буфер. Расчетная нагрузка на буфер:
где Q – вес груза, кН; Qк – вес каб Ход плунжера буфера:
где Vр= 1,15V – расчетная скорость посадки на буфер, м/с.
Необходимая площадь плунжера:
где Р0 = 400 Н/см2 – постоянное значение рабочего давления жидкости в гидроцилиндре на всем пути движения плунжера. Расчет направляющих
Рис. 9 Расчётная схема направляющей таврового профиля
Направляющая рассматривается как неразрезная многопролетная балка, загруженная в одном пролете поперечными, нормальными силами и продольной тормозной силой при посадке кабины (противовеса) на ловители.
Рис. 10.Расчётные схемы направляющей
Методика расчета направляющих противовеса особой специфики не имеет. В связи с этим, более детально рассмотрим расчет направляющей кабины. Определяем координаты центра тяжести сечения (рис. 9). Площадь поперечного сечения брутто Fб = F1 + F2 + F3 = b1 х h1 + b2 х h2 + b3 х h3 мм2,
Площадь поперечного сечения нетто Fн = F1 + F2 + F3 – 2F4 = b1 х h1 + b2 х h2 + b3 х h3 – 2b4 х h4 мм2,
Координаты центра тяжести сечения брутто Yсб = (F1 х Y1 + F2 х Y2 + F3 х Y3) / Fб мм, Xсб = 0 Координаты центра тяжести сечения нетто Yсн = (F1 х Y1 + F2 х Y2 + F3 х Y3 – 2F4 х Y4) / Fн мм; Xсн = 0, где Y1, Y2, Y3,Y4 – координаты центра элементарных площадок поперечного сечения относительно любой выбранной точки горизонтальной оси сечения. Момент инерции сечения брутто
Момент инерции нетто
Минимальная величина радиуса инерции брутто
Моменты сопротивления брутто при изгибе в плоскости направляющих для верхней точки сечения Wннб = Iхб/Yс мах мм3. Для нижней точки сечения Wннб = Iхб/Yс мин мм3. Момент сопротивления брутто при изгибе в плоскости перпендикулярной плоскости направляющих для крайней точки основания сечения направляющих: Wнкб = 2Iyб/В, мм3. Для точки на боковой поверхности головки направляющей: Wнгб = 2Iyб/b1 мм3. Момент сопротивления нетто при изгибе в плоскости направляющих в верхней точке сечения:
Wнвн = Iхн/Yс мах мм3. В нижней точке сечения: Wннн = Iхн/Yс мин мм3. Момент сопротивления нетто при изгибе в плоскости перпендикулярной плоскости направляющих в крайней точке основания сечения направляющей: Wнкн = 2Iyн/В мм3. В точке боковой поверхности головки: Wнгн = 2Iyн/b1 мм3. Производим расчет направляющей в рабочем режиме работы лифта с 10 % перегрузкой кабины. Предполагается, что в центре пролета направляющей действуют расчетная, нормальная сила Nн в плоскости направляющих и нормальная сила Nп перпендикулярная плоскости направляющих. Нормальные силы определяются рассмотренным выше методом при смещении центра масс груза в поперечном и продольном направлениях на величину А/6 и В/6, соответственно. Пролет реальной многопролетной балки заменяется расчетным эквивалентным, учитывающим влияние жесткости соседних пролетов, путем сокращения его длины до величины
В среднем сечении пролета во взаимно перпендикулярных направлениях действуют изгибающие моменты от поперечных сил в плоскости направляющих
В плоскости перпендикулярной плоскости направляющих
Наибольшее расчетное нормальное напряжение определяется геометрическим сложением нормальных напряжений, действующего в двух плоскостях изгиба
где Wн, Wп – минимальные значения величины момента сопротивления сечения направляющей соответствующих плоскостях изгиба. Коэффициент запаса прочности определяется по отношению пределу текучести материала направляющей (для Ст. 20 ГОСТ 1050-74 где [n] – допускаемый запас прочности в рабочем режиме. Приложение 1. Двигатели. Технические данные.
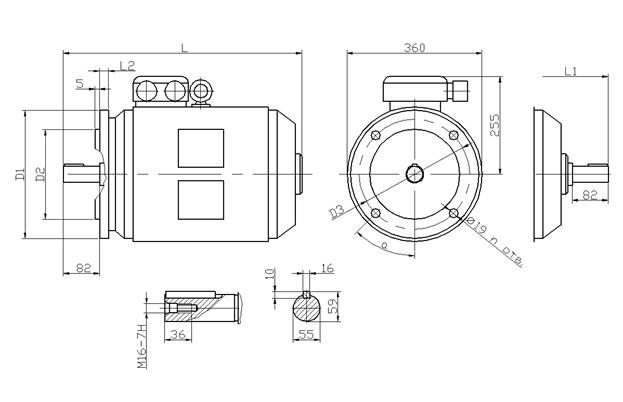
Размеры к чертежам:
Схемы и размеры лифтовых электродвигателей: 5АH225 фланцевый
5АН160S АН180S фланцевый
АН180S
5АН200M фланцевый АН200S фланцевый
АФ200M фланцевый
АФ225 фланцевый
Литература Основная литература 1. Зуев, Ф. Г. Подъемно-транспортные установки: учебник для вузов.- М.: КолосС, 2007 - 471 с.: ил. - (Учебники и учебные пособия для высших учебных заведений).- Библиогр. в конце кн. - ISBN 978-5-9532-0548-1 ((в пер.)) (4) 2. Баранов, А.П. ТулГУ. Подъёмники: учебное пособие / А.П.Баранов, В.А.Голутвин;ТулГУ.— Тула: Изд-во ТулГУ, 2004.— 148с.: ил. — Библиогр.в конце кн. — ISBN 5-7679-0514-2 (12) 3. Ройтман, В.М. Безопасность труда на объектах городского строительства и хозяйства при использовании кранов и подъемников: учеб.пособие для вузов / В.М.Ройтман, Н.П.Умнякова,О.И.Чернышева.— М.: АСВ, 2007.— 172с.: ил. — Библиогр.в конце кн. — ISBN 978-5-93093-420-5 (10) Дополнительная литература 1. Правила устройства и безопасной эксплуатации лифтов ПБ 10-558-03. – М.: ПИО ОБТ, 2003. - 174 с. 2. Яновски, (Janovsky L.)Проектирование механического оборудования лифтов / Л.Яновски;пер.И.А.Иноземцевой,под ред. С.Д.Бабичева; науч.ред. Г.Г.Архангельский.— 3-е изд. — М.: АСВ, 2005.— 336c.: ил. — Парал.тит.л.ит.яз. — Библиогр.в конце кн. — ISBN 5-93093-357-Х /в пер./: 3. Лифты. Учебник для вузов / Под общей ред. Д.П. Волков - М.: Изд-во АСВ, 1999 - 480 с. (14) 4. Волков, Д.П. Атлас конструкций лифтов: Учеб.пособие для вузов / Д.П.Волков,А.А.Ионов,П.И.Чутчиков.— М.: Изд-во АВС, 2003.— 156с.: ил. — ISBN 5-93093-213-1(3)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 202; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.106.241 (0.087 с.) |
 ,
, – для спуска;
– для спуска;  – для подъема.
– для подъема. для спуска и подъема различна, поэтому для расчета точности остановки следует брать большую величину. Тормозной путь можно рассчитать, пользуясь зависимостью между работами тормозящих, статических и инерционных сил. Если привести все эти силы к окружности шкива, то можно написать уравнение:
для спуска и подъема различна, поэтому для расчета точности остановки следует брать большую величину. Тормозной путь можно рассчитать, пользуясь зависимостью между работами тормозящих, статических и инерционных сил. Если привести все эти силы к окружности шкива, то можно написать уравнение: ,
, ,
, ,
, ,
,




 ;
; < [S’max]мм.
< [S’max]мм.












 мм4.
мм4. мм.
мм.
 kHm
kHm kHm
kHm .
. = 35000 Н/см2).
= 35000 Н/см2).  ,
,