Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механізми перетворення сил і швидкостей в апараті
РУХУ Як випливає из рівняння Хіла, кожний м'яз здатний розвивати силу Р и швидкість V у певному діапазоні величин: 0 < P < Pm; 0 < V < Vm Однак умови життєдіяльності організму настільки різноманітні, що таких значень може виявитися недостатньо. Для розширення цих діапазонів потрібні механізми, здатні перетворювати сили й швидкості. З механіки відомо, що найпростішим механізмом подібного роду є важіль - тверде тіло, що не піддається деформації та має точку опори (обертання).
Рис. 19
В організмі людини функцію важелів виконують кістки кістяка, які мають точки опори (точніше кажучи, обмежені поверхні контакту) з матеріальними тілами навколишнього середовища або з іншими костями.
Рис. 20 Прийнято розрізняти важелі першого й другого роду. Під важелем першого роду розуміють такий, у якого точка опори розташована між лініями діючих сил (pис. 19). Найкоротша відстань від точки опори до лінії дії відповідної сили називається плечем. Надалі будемо позначати силу, що розвивається м'язом, F, а її плече а; R- являє собою навантаження, проти якого працює м'яз, b - її плече. У якості навантажень найбільше часто виступає сила ваги окремих структурних компонентів організму (голови, плеча, тулуба і т.д.). В апараті руху важелі першого роду використовуються відносно рідко. Типовим прикладом такого важеля може служити череп, що має точку опори на першому хребці (рис. 20). У цьому випадку вага черепа є навантаженням, прикладеним до центру ваги черепа.
Рис. 21 Лінія дії цієї сили розташовується попереду від точки опори. Сила м'яза, що врівноважує навантаження, що й забезпечує збереження положення й рух черепа, розташовується позаду від точки обертання. До важелів другого роду належать такі, у яких лінії діючих сил перебувають по один бік від точки опори (рис.16). Ці важелі дуже широко представлені в опорно-руховому апараті. За суттю справи, усі елементи кінцівок (кисть, передпліччя, плече, стопа, гомілка, стегно) є важелями другого роду.
Рис. 22 Під перетворювачем швидкості розуміють важіль (рис. 22), для якого плече навантаження більше плеча м'язової сили b > а. Якщо при скороченні м'яза важіль рівномірно повертається на кут Q за час t, кутова швидкість обертання буде рівна = Q/t.
Лінійна швидкість руху кожної точки важеля виражається добутком кутової швидкості на радіус повороту, яким у цьому випадку є відстань від точки опори до відповідної точки важеля. Тоді для лінійної швидкості руху точок прикладення м'язової сили й навантаження будемо мати: V1 = і V2 = b
Рис. 23 Відношення швидкості руху точки прикладення навантаження до швидкості точки прикладення м'язової сили називається коефіцієнтом перетворення швидкості: k1 = V2 / V1 = b / a = b/a При скороченні м'яза точка прикріплення його до кістки буде переміщатися з лінійною швидкістю V1, а точка дії сили навантаження - зі швидкістю V2 = k1 1. Оскільки k1 > 1, V2 > V1. Як показує проведений аналіз, розглянутий важіль збільшує швидкість переміщення навантаження V2 стосовно швидкості скорочення м'яза V1. Саме цей ефект мають на увазі, коли говорять про важіль перетворення швидкості. На рисунку 23 представлена схема передпліччя, як важеля перетворювача швидкості. Так при а = 3 см, b = 30 см у цьому випадку k1 = 10.
Рис. 24
Важелі - перетворювачі сил - дозволяють урівноважувати більші навантаження відносно малими м'язовими силами. Для таких важелів плече м'язової сили a > b. Як відомо з фізики, рівновага важеля настає в тому випадку, якщо сума моментів прикладених сил дорівнює нулю. Для нашого випадку цю умову слід записати у вигляді: М1 = М2 (або af = br), де М1 = аf - момент м'язової сили, а М2 = br - момент навантаження. Відношення величини навантаження до сили м'язового скорочення називається коефіцієнтом перетворення сил. Як випливає із наведених вище співвідношень, ця величина дорівнює: k2 = R/F = a/b М'язова сила буде врівноважувати тем більше навантаження, чим більше співвідношення а/b. На рисунку 24 представлена схема стопи як перетворювача м'язової сили. КІНЕМАТИЧНІ ПАРИ
Рис. 25 В апараті руху кістки кістяка функціонують не ізольовано, а в тісному контакті з іншими кістками. З фізичної точки зору слід говорити про спільну дію важелів, що мають рухливе зчленування. Такий найпростіший механізм - комбінація із двох важелів першого, або другого роду, називається кінематичною парою (рис 25).
Характер відносного руху взаємодіючих важелів (ланок кінематичної пари) визначається геометричними особливостями зчленування. Залежно від виду поверхні контакту ланок зчленування прийнято розрізняти циліндричні, еліпсоїдальні, кулясті, блокоподібні й інші.
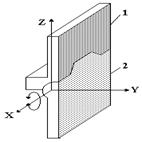
Рис. 26 Розглянемо функціонування такої кінематичної пари, у якій контакт ланок здійснюється за циліндричною поверхнею (рис. 26). На кінці однієї ланки розташовується циліндричне поглиблення, а друга - містить циліндричну голівку. Будемо вважати, що ланка 2 – нерухлива, й розглянемо рух першої ланки. Для кількісного опису руху виберемо систему координат, пов'язану з нерухливою ланкою таким чином, щоб вісь Х збігалася з віссю циліндричної поверхні, що сполучає. Зовсім очевидно, що перша ланка може переміщатися поступально уздовж осі Х, а також обертатися навколо неї. Для опису положення й переміщення кожної точки цієї ланки будуть потрібні дві незалежні координати: лінійна Х и кутова - кут повороту Q. Кількість незалежних координат n, необхідних для повного опису руху, називається числом ступенів свободи зчленування кінематичної пари. У цьому випадку циліндричне зчленування має два ступені свободи. У процесі руху координати не можуть змінюватися довільно в будь-яких межах. Якщо в розглянутому випадку координата Х буде необмежено зростати, то ланки перестануть контактувати одна з одною і кінематична пара зруйнується. Те ж саме можна сказати й відносно кутової координати Q. Отже, кожна координата має певну межу зміни: Х1 < X < X2; Q1 < Q < Q2
Рис. 27 Сукупність діапазонів зміни координат за відповідними до ступенів свободи визначає обсяг руху конкретного зчленування. В організмі дуже рідко використовуються ступені свободи, що допускають лінійні переміщення. Обмеження руху за цими ступенями свободи досягається в результаті ускладнення циліндричної поверхні, або за допомогою зв'язкового апарата (наприклад, у колінному суглобі обсягу руху лімітується хрестоподібними зв'язками). У блокоподібному зчленуванні контакт ланок відбувається не за циліндричною, а за більш складною поверхнею, що нагадує поверхню блоку (рис. 27).Таке зчленування, і відповідно суглоб, припускає обертання тільки навколо однієї осі Х и тому його називають одноосьовим або одноаксіальним. Ліктьовий суглоб може бути прикладом такого зчленування. Найбільшим обсягом руху має кулястий суглоб. Як випливає из його назви, контакт ланок кінематичної пари відбувається за сферичною поверхнею. Прикладом кулястих зчленувань служить тазостегновий або плечовий суглоб.
Рис. 28 В одній ланці є сферична западина, а в іншій - куляста голівка. Таке зчленування припускає обертання навколо трьох взаємоперпендикулярних осей (тpиаксиальне зчленування) (pис.28). Для опису обсягу руху в шаpоподібному суглобі необхідно три ступені свободи (три незалежні координати) і відповідно три діапазони змін цих кутів повороту: 1 < < < < n = 3 < <
Рис. 29
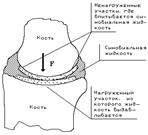
При русі суглобних поверхонь на кості діють сили тертя Fт = k Fн, де k - коефіцієнт тертя, Fн - сила нормального тиску до поверхні контакту. При великому коефіцієнті k енергія, витрачена на подолання сили тертя, вивільнюється в суглобі у вигляді тепла. Безсумнівно, що при енергійному русі поверхні зчленування розігрівалися б до температур, при яких можливе ушкодження тканини. Застосування змащення (рідких середовищ) між поверхнями контакту дозволяє зменшити коефіцієнт тертя в 10 - 20 раз. У процесі еволюції був створений спеціальний механізм, що знижує тертя в дійсних суглобах людини, на основі використання рідких середовищ у зчленуваннях кінематичних пар.
На рисунку 29 наведений типовий дійсний суглоб. Кінці обох кісток покриті шаром хряща. Суглоб оточений капсулою, а його порожнина заповнена синовіальною рідиною. Хрящ нагадує губку з тонкими порами й просочений синовіальною рідиною, яку можна з нього витиснути. Губчата структура хряща створюється не замкненими гніздами, а надзвичайно тонкими порами. Ці пори настільки тонкі, що синовіальна рідина не може видавлюватися з них занадто швидко. Силового впливу поверхня контакту хряща зазнає на невеликій ділянці. Із цієї ділянки виділяється рідина й, перш ніж вийти в порожнину суглоба, проходить досить великий шлях усередині хряща, паралельно його поверхні. Інші ненавантажені ділянки хряща вільно усмоктують синовіальну рідину. Жодна ділянка хряща не може бути дуже сильно "вичавлена". Це забезпечується, по-перше, за рахунок щодо великого часу плину синовіальної рідини в порах, а по-друге, у результаті зміни області зіткнення внутрісуглобних хрящів. Приміром, ссавці ніколи не стоять подовгу в одній позі, а час від часу змінюють її. За рахунок цього забезпечується зміна області силового контакту в колінному суглобі. КІНЕМАТИЧНІ ЛАНЦЮГИ Кінематична пара є найбільш простим механізмом, що дозволяє збільшити обсяг руху важелів. В організмі використовуються більш складні конструкції - кінематичні ланцюги (рухливе зчленування більш ніж двох ланок), які суттєво розширюють обсяг руху в опорно-руховому апарату. Типовим прикладом кінематичного ланцюга є верхня й нижня кінцівка, хребет і ін. Так, у верхній кінцівці ланками ланцюгу є плече, передпліччя, кисть, фаланги пальців. Обсяг руху в кінематичному ланцюзі значно зростає, оскільки збільшується число ступенів свободи в кожнім зчленуванні й відповідні діапазони зміни незалежних координат. У принципі весь кістяк слід розглядати як складний кінематичний ланцюг, складений з окремих рухливих кісток. Як показують теоретичні оцінки, загальне число ступенів свободи кістяка з урахуванням усіх можливих рухів у суглобах досягає 240.
|
|||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 157; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.189.2.122 (0.014 с.) |