
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Геометрична інтерпретація задачі нелінійного програмування
Геометрично цільова функція (8.1) визначає деяку поверхню, а обмеження (8.2)-(8.3) – допустиму підмножину n -вимірного евклідового простору. Знаходження оптимального розв’язку задачі нелінійного програмування зводиться до відшукання точки з допустимої підмножини, в якій досягається поверхня найвищого (найнижчого) рівня. Якщо цільова функція неперервна, а допустима множина розв’язків замкнена, непуста і обмежена, то глобальний максимум (мінімум) задачі існує. Найпростішими для розв’язування є задачі нелінійного програмування, що містять систему лінійних обмежень та нелінійну цільову функцію. В цьому разі область допустимих розв’язків є опуклою, непустою, замкненою, тобто обмеженою. Розглянемо приклад геометричного способу розв’язування задачі нелінійного програмування. Приклад 8.1. Знайти мінімальне і максимальне значення функції:
за умов:
Розв’язання. Область допустимих розв’язків утворює чотирикутник АВСD (рис.8.1).
Рисунок 8.1 Геометрично цільова функція являє собою коло з центром у точці М (2;2), квадрат радіуса якого
Оскільки Очевидно, що найменший радіус
Тобто точка М є точкою мінімуму, оскільки їй відповідає найменше можливе значення цільової функції. Зазначимо, що в даному разі точка, яка відповідає оптимальному плану задачі (мінімальному значенню функціонала), знаходиться всередині багатокутника допустимих розв’язків, що в задачах лінійного програмування неможливо. Приклад 8.2. Знайти мінімальне значення функції:
за умов:
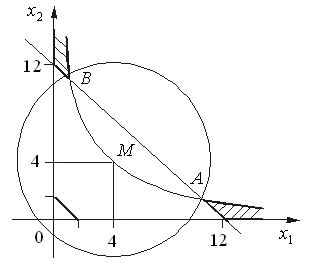
Розв’язування. У даному прикладі множина допустимих розв’язків складається з двох окремих частин, необмежених зверху (рис.8.2).
Рисунок 8.2 Цільова функція аналогічно попередньому випадку є колом з центром у точці М (4;4). Функція Z має два локальних мінімуми: в точці А ( Значення функціонала в цих точках однакове і дорівнює:
Отже, маємо два альтернативні оптимальні плани. Даний приклад ілюструє ще одну особливість задач нелінійного програмування: на відміну від задач лінійного програмування багатогранник допустимих розв’язків задачі нелінійного програмування не обов’язково буде опуклою множиною.
Наведемо основні особливості задач нелінійного програмування, що зумовлюють необхідність застосування відповідних методів їх розв’язання.
|
|||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 170; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.210.76 (0.006 с.) |


 .
.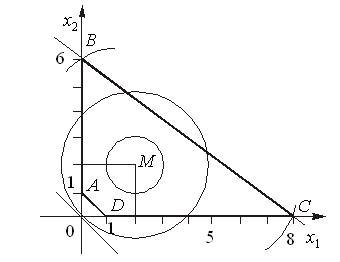
 . Це означає, що її значення буде збільшуватися (зменшуватися) зі збільшенням (зменшенням) радіуса кола. Проведемо з точки М кола різних радіусів. Функція Z має два локальних максимуми: точки В (0;6) і С (8;0). Обчислимо значення функціонала в цих точках:
. Це означає, що її значення буде збільшуватися (зменшуватися) зі збільшенням (зменшенням) радіуса кола. Проведемо з точки М кола різних радіусів. Функція Z має два локальних максимуми: точки В (0;6) і С (8;0). Обчислимо значення функціонала в цих точках: ,
, .
. , то точка С (8;0) є точкою глобального максимуму.
, то точка С (8;0) є точкою глобального максимуму. , тоді:
, тоді: .
.

 .
.
 ), і в точці В (
), і в точці В ( ).
). .
.


