Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности измерения доплеровской частоты в системе ДИСС
2.2.1. Особенности измерения доплеровской частоты При работе ДИСС доплеровский спектр отраженного сигнала даже при непрерывном излучении передатчика не является монохроматическим. Действительно, в реальной системе луч ДНА имеет конечную ширину, как в вертикальной, так и в горизонтальной плоскости. В связи с этим на местности освещается участок Посв, содержащий множество хаотически распределенных отражателей (см. рис.2.5). Участки, облучаемые под одним и тем же углом Вi к вектору скорости Из этой же формулы видно, что геометрическим местом рас-сеивателей, сигналы от которых имеют одинаковую fд, является линия пересечения с земной поверхностью конуса, ось которого совпадает с направлением вектора Облучаемая площадка, как видно из рис. 2.5, содержит множество изочастотных линий, каждой из которых соответствует свое значение угла Вi. Тогда заданному постоянному значению горизонтальной скорости объекта должен соответствовать спектр частот отраженного сигнала, определяемый выражением
Чтобы определить характер распределения мощности такого спектра, сделаем ряд упрощающих предположений: считаем диаграммы направленности передающей и приемной антенн симметричными и одинаковыми; в пределах малых углов раствора антенного луча
Рис. 2.5. Образование доплеровского спектра
При этих условиях энергия отраженного сигнала будет определяться только усилением антенны, т.е. ее полярной диаграммой направленности. В тех случаях, когда отражающий участок Посв (обычно имеющий удлиненную форму) находится под каким-либо углом к изочастотным линиям, форма спектра Sд (f) определяется раскрывом ДНА в двух плоскостях. Если участок Посв расположен вдоль изочастотных линий, как это представлено на рис. 2.5, то форма спектра определяется диаграммой направленности луча антенны в плоскости углов В (проходящей через ось луча и вектор путевой скорости). Такая ДНА может быть аппроксимирована кривой Гаусса
где В0 – угол, соответствующий оси симметрии луча антенны в плоскости x0y, а
где Sf до - значение спектра на средней частоте Ширина доплеровского спектра по уровню половинной мощности в случае непрерывного излучения определяется приближенно
где При полете объекта над сушей максимум огибающей доплеровского спектра практически совпадает с частотой При полете над морем картина изменяется. Как видно из рис. 2.6, отражательная способность σ0 морской поверхности резко убывает при уменьшении угла падения В. Поэтому в пределах облучаемой площадки она будет уменьшаться с уменьшением угла В. Соответственно при полете над морем кривая распределения энергии доплеровского спектра деформируется, как показано на рис. 2.7. При этом центр тяжести огибающей смещается относительно частоты При определении скорости по средней частоте доплеровского спектра это дает ошибку (fд0 - f /д0) за счет "морского эффекта".
дБ
Рис. 2.6. Зависимость σ0 (удельной ЭПР) от угла визирования и степени морского волнения
Рис. 2.7. Искажения доплеровского спектра при полете над морем при волнении 4 балла
При практически применяемых в доплеровских системах углах падения В =60°... 70° ошибка за счет "морского эффекта" имеет величину около 1%, уменьшить ее можно путем сужения ДНА в плоскости, перпендикулярной изочастотным линиям. Однако, в ДИСС использован более практичный метод, заключающийся в измерении σ0 и автоматическом учете поправки при вычислении
2.2.2. Способы определения доплеровской частоты Рассмотрим подробнее процесс определения В основу работы счетчика "нулей" положен тот факт, что положение спектра сигнала на оси частот характеризуется среднеквадратичной частотой
где Sд(f) – спектральная плотность сигнала; Pc – мощность сигнала. При нормальном распределении значений амплитуд сигнала среднеквадратичная частота совпадает со средним числом пересечений сигналом нулевой оси амплитуд за секунду в одном направлении при бесконечном времени усреднения. При ограниченном времени усреднения среднеквадратическая частота определяется с некоторой погрешностью. Число нулей N(Tу) за время Tу флюктуирует около средней величины Интервал корреляции узкополосного случайного сигнала связан с шириной его спектра приближенным соотношением τкорр ≈1/∆f. Это означает, что значения мгновенной частоты, разделенные интервалом t>τкорр , независимы одно от другого. При интегрировании показаний частотомера за время Ту имеет место усреднение вcex независимых замеров частоты fд за это время. Полное число таких замеров N за время Ту определяется формулой N ≈ Ту / τкорр = Ту ∆fд.
Из теории ошибок известно, что при усреднении результатов независимых равноточных замеров некоторой заданной величины результирующая среднеквадратичная погрешность замеров в Следовательно, результирующая среднеквадратичная погрешность измерения частоты
Тогда относительную среднеквадратичную погрешность измерения путевой скорости σw определяем, как
а среднеквадратичную флуктуационную погрешность измерения угла сноса определяем из следующей формулы
Недостаток способа подсчета "нулей" состоит в том, что полоса пропускания фильтра доплеровских частот приемного устройства ДИСС определяется диапазоном измеряемых доплеровских частот ∆fд и много шире текущего обрабатываемого спектра (см. рис. 2.8.а). Это приводит к уменьшению отношения сигнал/шум и к увеличению требуемой рабочей мощности передатчика. От этого недостатка свободен метод измерения, используемый в ДИСС-7 и состоящий в слежении за средней частотой доплеровского спектра сигнала.
Рис. 2.8. Доплеровский спектр и полоса пропускания измерителя частоты: а – при методе счета "нулей", б – при методе слежения за средней частотой
Как видно из рис. 2.8 б, полоса пропускания измерителя в режиме слежения за средней частотой существенно уже, что позволяет снизить минимально необходимое входное значение сигнал/шум. Так, при относительной погрешности измерения 0,2%, метод слежения за средней частотой позволяет иметь на входе соотношение сигнал/шум на 8-12 дБ ниже, чем метод счета "нулей".
Структурная схема ДИСС-7 2.3.1. Доплеровский измеритель скорости и угла сноса Доплеровский измеритель скорости и угла сноса ДИСС-7 предназначен для работы в составе навигационно-пилотажных комплексов и обеспечивает непрерывное автоматическое вычисление составляющих полной скорости самолета (путевой скорости) и угла сноса. Работа измерителя ДИСС-7 основана на использовании эффекта Доплера в режиме непрерывного излучения при последовательной коммутации сигнала передатчика по четырем лучам антенны. Для решения уравнений (2.13), (2.14), (2.15) и определения всех составляющих полной скорости (Wx, Wy, Wz) станция имеет антенную систему с тремя некомпланарными лучами. Четвертый луч служит для получения информации о характеристиках отражающей поверхности, необходимой при автоматическом вычислении поправки на "морской эффект". Угол падения этого луча (84°) отличается от углов падения первых трех (74°). Из сравнения мощностей отраженных сигналов, принимаемых по первому и четвертому лучам, оценивается смещение доплеровского спектра и по результатам оценки в вычислительное устройство автоматически вводится поправка.
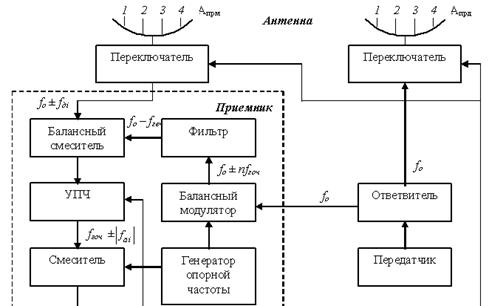
2.3.2. Блок-схема ДИСС-7 На рис. 2.9 приведена блок-схема ДИСС-7. Высокочастотный сигнал, генерируемый магнетронным передатчиком, поступает на ответвитель и через переключатель лучей на вход передающей антенны, где излучается в направлении земной поверхности последовательно во времени по четырем лучам с частотой коммутации Fк =2,5 Гц. Отраженные от земной поверхности сигналы принимаются приемной антенной так же последовательно по четырем лучам и через переключатель лучей поступают затем на вход приемника. Приемник осуществляет двойное преобразование частоты и усиление принятого сигнала. С выхода приемника спектры доплеровских частот со средними частотами
2.3.3. Антенная система Антенная система состоит из двух антенн: приемной Апрм и передающей Апрд, каждая из которых выполнена по схеме двухзеркальной антенны с поворотом плоскости поляризации. Диаметры зеркал 320 мм, ширина луча около 4°. Это дает возможность расположить облучатели в плоскости зеркала, а линии подвода высокочастотного сигнала разместить за пределами рабочей поверхности. Такое конструктивное решение устраняет затенение рабочей поверхности зеркала облучателя. Антенная система, формируется луч с диаграммой направленности "карандашного" типа. Требуемый наклон луча обеспечивается выносом соответствующего рупора-излучателя из фокуса антенны. Всего рупоров-излучателей четыре, по числу формируемых лучей.
2.3.4. Передатчик Передатчик выполнен на магнетроне, имеющем два высокочастотных вывода. Один из них служит для подключения нагрузки, второй – для подключения узла стабилизации частоты в виде высокодобротного объемного резонатора. Частота генерации f0 =13325 МГц, относительная нестабильность примерно 10-3.
2.3.5. Приемник Приемник выполнен по схеме двойного преобразования частоты. На балансный модулятор (рис.2.9) поступает с ответвителя часть мощности передатчика и сигнал от генератора опорной частоты fг оч. На выходе смесителя формируется спектр частот mf0 ± nfг оч (m, n = 1, 2...), из которого с помощью фильтра выделяется сигнал разностной частоты f0 - fг оч и поступает на балансный смеситель. На него же поступает сигнал со средней частотой f0 ±
2.3.6. Блок ФАПЧ Блок предназначен для измерения сигнала со средней частотой Имеется два режима работы: "Поиск" и "Слежение". Канал работает в режиме "Поиск" в следующих случаях: при отсутствии сигнала по данному каналу; при малом отношении сигнал/шум, не превышающем заданное пороговое значение (qс/ш <1); при выходе сигнала за полосу пропускания дискриминатора. Схема управления работает в этом случае таким образом, что частота перестраиваемого генератора начинает изменяться от нижней границы диапазона 1,5 кГц до верхней 30 кГц. При достижении последней частота начинает изменяться к нижней границе диапазона. Такой процесс будет продолжаться до тех пор, пока на вход дискриминатора и автомата захвата не поступит доплеровский сигнал в указанном диапазоне. Скорость изменения частоты перестраиваемого генератора в этом режиме постоянна.
Рис. 2.9. Структурная схема ДИСС-7 В режиме "Слежение" направление изменения частоты перестраиваемого генератора определяется сигналом "Знак ошибки" (+) и "Знак ошибки" (−) на выходе блока управления. Знак изменения частоты перестраиваемого генератора зависит в данный момент времени от знака ошибки. Для согласования полосы пропускания дискриминатора в соответствии с принимаемым спектром частот доплеровского сигнала она может изменяться. "Узкая" полоса соответствует нижним частотам диапазона ( В блоке ФАПЧ также имеется режим "Память", в который система автоматически переходит на время не более 3 … 5 с в следующих случаях: при отсутствии доплеровской информации хотя бы по одному из каналов; при величине напряжения поправки на характер отражающей поверхности Uх оп, не соответствующей реальной величине.
2.3.7. Блок коммутации Обеспечивает электрическое соединение всех блоков системы, подключение резервных блоков ФАПЧ и передатчика, а также выдачу сигналов, обеспечивающих синхронную работу каналов измерителя и его встроенный штатный контроль. 2.3.8. Вычислитель Вычислитель осуществляет расчет поправки на характер отражающей поверхности, используя логарифмический усилитель и производит вычисление величины Uх оп по формуле Uх оп=k ln(U4/U1), где U4, U1 – эффективные значения напряжения доплеровского сигнала на входе вычислителя поправки при работе четвертого и первого каналов соответственно; k – коэффициент пропорциональности; Uх оп – постоянное напряжение, пропорциональное величине поправки на характер отражающей поверхности.
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 1226; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.141.6 (0.051 с.) |
 , будут иметь одну и ту же доплеровскую частоту согласно формуле (2.1).
, будут иметь одну и ту же доплеровскую частоту согласно формуле (2.1).
 можно не учитывать различие энергий элементарных отраженных сигналов, связанное с различием расстояний до соответствующих участков отражающей площадки; будем считать коэффициенты обратного рассеяния всех участков отражающей площадки одинаковыми.
можно не учитывать различие энергий элементарных отраженных сигналов, связанное с различием расстояний до соответствующих участков отражающей площадки; будем считать коэффициенты обратного рассеяния всех участков отражающей площадки одинаковыми.
 , (2.18)
, (2.18) - эффективная ширина ДНА. Тогда спектр отраженного сигнала может быть записан
- эффективная ширина ДНА. Тогда спектр отраженного сигнала может быть записан , (2.19)
, (2.19) ; Δfд – эффективная ширина спектра.
; Δfд – эффективная ширина спектра. , (2.20)
, (2.20) в сторону более низкой частоты
в сторону более низкой частоты  .
.

 .
. , (2.21)
, (2.21) , при этом
, при этом  – мощность флюктуаций числа нулей за время Ту. В свою очередь
– мощность флюктуаций числа нулей за время Ту. В свою очередь  и
и  зависят также от ширины спектра мощности сигнала
зависят также от ширины спектра мощности сигнала  .
. раз меньше погрешности единичного замера.
раз меньше погрешности единичного замера.
 , (2.22)
, (2.22) . (2.23)
. (2.23)


 поступают на вход блока фазовой автоподстройки частоты (ФАПЧ). ФАПЧ выделяет частоту
поступают на вход блока фазовой автоподстройки частоты (ФАПЧ). ФАПЧ выделяет частоту  по каждому из каналов (номер канала соответствует номеру луча). Выходные сигналы системы ФАПЧ подаются в бортовое вычислительное устройство и систему индикации. В целях повышения надежности в станции ДИСС-7 применено резервирование наиболее ответственных блоков: блока ФАПЧ и блока передатчика.
по каждому из каналов (номер канала соответствует номеру луча). Выходные сигналы системы ФАПЧ подаются в бортовое вычислительное устройство и систему индикации. В целях повышения надежности в станции ДИСС-7 применено резервирование наиболее ответственных блоков: блока ФАПЧ и блока передатчика.  .
.