
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Институт радиотехники и электроники (ирэ)Стр 1 из 10Следующая ⇒
ИНСТИТУТ РАДИОТЕХНИКИ И ЭЛЕКТРОНИКИ (ИРЭ) ________________________________________________________________
О.А. Алексеев, А.И. Баскаков, В.А. Терехов
РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ Часть 1. Автономные радионавигационные системы Летательных аппаратов Учебное пособие по курсам «Радионавигационные системы», «Теория и техника радиолокации и радионавигации»
Под редакцией Ю.Н. Бугаева
Москва Издательский дом МЭИ 2014
УДК 621.396 А 273 Утверждено учебным управлением НИУ МЭИ в качестве учебного пособия для студентов Подготовлено на кафедре радиотехнических приборов Рецензент: доцент Бугаев Ю.Н.
А 273 Алексеев О.А. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ. Часть 1. Автономные радионавигационные системы летательных аппаратов. Учебное пособие/ О.А. Алексеев, А.И. Баскаков, В.А. Терехов. Под. ред. Ю.Н. Бугаева. – М.: Издательский дом МЭИ, 2014 – 68 с.
Рассмотрены вопросы построения и функционирования радиовысотомеров, доплеровских измерителей скорости и угла сноса летательных аппаратов, а также систем счисления пути и обзорно-сравнительных навигационных систем. Пособие предназначено для студентов, изучающих курсы «Радионавигационные системы», «Теория и техника радиолокации и радионавигации».
© Национальный исследовательский университет «МЭИ», 2014
ВВЕДЕНИЕ В пособии рассматриваются специфические вопросы, связанные с построением и функционированием автономных радионавигационных систем летательных аппаратов, т.е. систем, позволяющих определять его местоположение без помощи спутниковой радионавигации. Ограниченный объем пособия не позволяет подробно останавливаться на особенностях аппаратурной реализации отдельных узлов и блоков. Эти вопросы достаточно подробно разбираются в курсах по радиопередающим и радиоприемным устройствам. Основное внимание в пособии уделяется следующим вопросам: особенностям отражения радиосигналов от подстилающей поверхности и получении формул, необходимых для расчета мощности отраженного сигнала, определению спектральных характеристик отраженных сигналов, анализу и оценке возможных ошибок измерения навигационных параметров на борту летательного аппарата.
РАДИОВЫСОТОМЕРЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Принцип действия и основные соотношения РАДИОЛОКАЦИОННАЯ СИСТЕМА ДОПЛЕРОВСКОГО ИЗМЕРЕНИЯ СКОРОСТИ И УГЛА СНОСА (ДИСС) ЛЕТАТЕЛЬНОГО АППАРАТА Структурная схема ДИСС-7 2.3.1. Доплеровский измеритель скорости и угла сноса Доплеровский измеритель скорости и угла сноса ДИСС-7 предназначен для работы в составе навигационно-пилотажных комплексов и обеспечивает непрерывное автоматическое вычисление составляющих полной скорости самолета (путевой скорости) и угла сноса. Работа измерителя ДИСС-7 основана на использовании эффекта Доплера в режиме непрерывного излучения при последовательной коммутации сигнала передатчика по четырем лучам антенны. Для решения уравнений (2.13), (2.14), (2.15) и определения всех составляющих полной скорости (Wx, Wy, Wz) станция имеет антенную систему с тремя некомпланарными лучами. Четвертый луч служит для получения информации о характеристиках отражающей поверхности, необходимой при автоматическом вычислении поправки на "морской эффект". Угол падения этого луча (84°) отличается от углов падения первых трех (74°). Из сравнения мощностей отраженных сигналов, принимаемых по первому и четвертому лучам, оценивается смещение доплеровского спектра и по результатам оценки в вычислительное устройство автоматически вводится поправка.
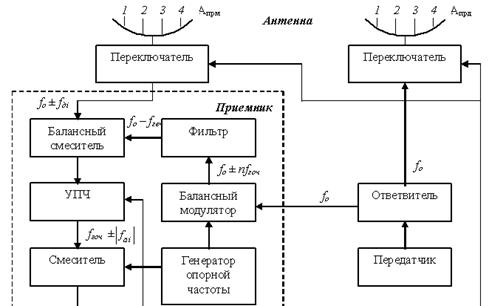
2.3.2. Блок-схема ДИСС-7 На рис. 2.9 приведена блок-схема ДИСС-7. Высокочастотный сигнал, генерируемый магнетронным передатчиком, поступает на ответвитель и через переключатель лучей на вход передающей антенны, где излучается в направлении земной поверхности последовательно во времени по четырем лучам с частотой коммутации Fк =2,5 Гц. Отраженные от земной поверхности сигналы принимаются приемной антенной так же последовательно по четырем лучам и через переключатель лучей поступают затем на вход приемника. Приемник осуществляет двойное преобразование частоты и усиление принятого сигнала. С выхода приемника спектры доплеровских частот со средними частотами
2.3.3. Антенная система Антенная система состоит из двух антенн: приемной Апрм и передающей Апрд, каждая из которых выполнена по схеме двухзеркальной антенны с поворотом плоскости поляризации. Диаметры зеркал 320 мм, ширина луча около 4°. Это дает возможность расположить облучатели в плоскости зеркала, а линии подвода высокочастотного сигнала разместить за пределами рабочей поверхности. Такое конструктивное решение устраняет затенение рабочей поверхности зеркала облучателя. Антенная система, формируется луч с диаграммой направленности "карандашного" типа. Требуемый наклон луча обеспечивается выносом соответствующего рупора-излучателя из фокуса антенны. Всего рупоров-излучателей четыре, по числу формируемых лучей.
2.3.4. Передатчик Передатчик выполнен на магнетроне, имеющем два высокочастотных вывода. Один из них служит для подключения нагрузки, второй – для подключения узла стабилизации частоты в виде высокодобротного объемного резонатора. Частота генерации f0 =13325 МГц, относительная нестабильность примерно 10-3.
2.3.5. Приемник Приемник выполнен по схеме двойного преобразования частоты. На балансный модулятор (рис.2.9) поступает с ответвителя часть мощности передатчика и сигнал от генератора опорной частоты fг оч. На выходе смесителя формируется спектр частот mf0 ± nfг оч (m, n = 1, 2...), из которого с помощью фильтра выделяется сигнал разностной частоты f0 - fг оч и поступает на балансный смеситель. На него же поступает сигнал со средней частотой f0 ±
2.3.6. Блок ФАПЧ Блок предназначен для измерения сигнала со средней частотой Имеется два режима работы: "Поиск" и "Слежение". Канал работает в режиме "Поиск" в следующих случаях: при отсутствии сигнала по данному каналу; при малом отношении сигнал/шум, не превышающем заданное пороговое значение (qс/ш <1); при выходе сигнала за полосу пропускания дискриминатора. Схема управления работает в этом случае таким образом, что частота перестраиваемого генератора начинает изменяться от нижней границы диапазона 1,5 кГц до верхней 30 кГц. При достижении последней частота начинает изменяться к нижней границе диапазона. Такой процесс будет продолжаться до тех пор, пока на вход дискриминатора и автомата захвата не поступит доплеровский сигнал в указанном диапазоне. Скорость изменения частоты перестраиваемого генератора в этом режиме постоянна.
Рис. 2.9. Структурная схема ДИСС-7 В режиме "Слежение" направление изменения частоты перестраиваемого генератора определяется сигналом "Знак ошибки" (+) и "Знак ошибки" (−) на выходе блока управления. Знак изменения частоты перестраиваемого генератора зависит в данный момент времени от знака ошибки. Для согласования полосы пропускания дискриминатора в соответствии с принимаемым спектром частот доплеровского сигнала она может изменяться. "Узкая" полоса соответствует нижним частотам диапазона ( В блоке ФАПЧ также имеется режим "Память", в который система автоматически переходит на время не более 3 … 5 с в следующих случаях: при отсутствии доплеровской информации хотя бы по одному из каналов; при величине напряжения поправки на характер отражающей поверхности Uх оп, не соответствующей реальной величине.
2.3.7. Блок коммутации Обеспечивает электрическое соединение всех блоков системы, подключение резервных блоков ФАПЧ и передатчика, а также выдачу сигналов, обеспечивающих синхронную работу каналов измерителя и его встроенный штатный контроль. 2.3.8. Вычислитель Вычислитель осуществляет расчет поправки на характер отражающей поверхности, используя логарифмический усилитель и производит вычисление величины Uх оп по формуле Uх оп=k ln(U4/U1), где U4, U1 – эффективные значения напряжения доплеровского сигнала на входе вычислителя поправки при работе четвертого и первого каналов соответственно; k – коэффициент пропорциональности; Uх оп – постоянное напряжение, пропорциональное величине поправки на характер отражающей поверхности.
Радионавигационных систем 3.1.1. Принцип построения обзорно-сравнительных систем Обзорно-сравнительные системы (ОСС) предназначены для определения местоположения ЛА по результатам сравнения некоторых наблюдаемых с помощью бортовых датчиков физических параметров, характеризующих местность, над которой совершается полет, с эталонными параметрами, хранящимися в памяти системы. В радиотехнических ОСС наблюдаемыми параметрами являются высоты точек рельефа местности, дальность и угловые координаты радиолокационных ориентиров на местности и другие навигационные параметры, определяемые радионавигационными и радиолокационными системами.
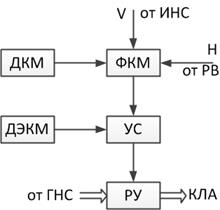
Принцип действия ОСС заключается в следующем. Заранее, до полета, заготавливается эталонная карта местности (ЭКМ), на которой местность, где предполагается проведение полета, изображается в таком виде, в каком ее дает датчик, установленный на ЛА. Во время полета ЛА его бортовые датчики воспроизводят текущее изображение местности, т.е. дают текущую карту местности (ТКМ). Полученная ТКМ сравнивается в специальном устройстве с ЭКМ. По результатам сравнения указанных карт определяют отклонение текущего положения ЛА (точка Обобщенная структурная схема ОСС приведена на рис. 3.2. Датчик карты местности (ДКМ) вырабатывает сигналы, характеризующие информативные параметры местности (рельеф местности, ее отражающая способность, естественное излучение земной поверхности, профиль горизонта и т.п.), над которой происходит полет ЛА. Сигналы с ДКМ поступают на формирователь карты местности ФКМ, который преобразует эти сигналы в форму, удобную для сравнения с эталонной картой. Необходимая для сравнения опорная информация подается с датчика эталонной карты местности ДЭКМ (блок памяти системы). Обычно ФКМ осуществляет дискретизацию по времени, квантование по уровню и масштабирование по скорости V и высоте H сигналов ДКМ, Требуемая для такого преобразования информация поступает от внешних систем и устройств (инерциальная система ИНС, радиовысотомер РВ и др.). Устройство сравнения карт местности (УС) производит перебор возможных положений ЛА на эталонной карте и для каждого такого положения вычисляет по определенному алгоритму меру сходства наблюдаемого изображения местности с эталонным изображением.
Обычно УС представляет собой коррелятор, который вычисляет взаимнокорреляционную функцию (ВКФ) наблюдаемого изображения (ТКМ) и эталонного изображения (ЭКМ). Поэтому метод, на котором основана работа ОСС, называют корреляционным, а сами системы относят к классу корреляционно-экстремальных навигационных систем. В таких системах точному совпадению изображений соответствует экстремум (максимум или минимум) нормированной ВКФ. Анализ результатов сравнения карт производит решающее устройство (РУ). Это устройство, сопоставляя результаты сравнения с информацией о местоположении ЛА от грубой навигационной системы (ГНС) (инерциальная или доплеровская система счисления пути), определяет координаты ЛА (КЛА). Функции формирователя карты местности, сравнивающего и решающего устройств обычно выполняет ЦВМ ОСС, Иногда для ускорения процесса сравнения карт устройство сравнения выполняется в виде отдельного специализированного процессора.
Точность определения местоположения с помощью ОСС зависит от степени достоверности и детальности эталонной карты местности. Для изготовления ЭКМ используют данные, полученные от искусственных спутников Земли, данные аэрофотосъемки местности, анализ детальных топографических карт и другие источники информации. Системы, в которых информация обрабатывается в ЦВМ, используют цифровые ЭКМ, представляющие собой матрицу из ячеек (см. рис. 3.1), содержащих кодированную информацию об элементарном участке местности. Минимальный размер ячейки ЭКМ определяется разрешающей способностью бортового датчика текущей карты местности, а записанное в нее число - динамическим диапазоном изменения измеряемого датчиком параметра и принятым уровнем квантования сигнала этого датчика. Чем меньше размеры ячейки (чем выше разрешающая способность датчика) и уровень квантования, тем более подробной будет эталонная карта и тем выше потенциальная точность ОСС. Однако при большой протяженности маршрута, для которого заготовляется эталонная карта, и большой детальности последней требуется очень большой объем памяти ЦВМ ОСС, Поэтому при выборе размера эталонной карты, размера ячейки и уровня квантования исходят из компромисса между требуемой точностью и объемом памяти системы. Одним из таких, часто используемых компромиссных подходов, является применение ОСС только на отдельных участках коррекции системы счисления пути. Расстояние между такими участками коррекции зависит от степени снижения точности системы счисления со временем, и чем меньше скорость увеличения погрешностей системы счисления (т.е, чем выше точность этой системы), тем реже требуется ее коррекция, тем меньше требуемый объем памяти ОСС. Точность современных ИНС соответствует накопленной погрешности в 1,85 км за 1 час полета [2]. Дополнительного снижения требований к объему памяти ОСС достигают путем постепенного повышения точности местоопределения в ОСС по мере приближения к конечному пункту маршрута ЛА. В этом случае на начальном этапе маршрута используют более грубые эталонные карты с большими размерами ячеек и большим уровнем квантования, а на конечном - эталонные карты с максимальной степенью детализации. Структурная схема навигационной системы, в которой ОСС служит для коррекции инерциальной системы счисления пути, приведена на рис. 3.3. Здесь получаемая от датчика текущей карты местности (ДКМ) информация обрабатывается совместно с информацией от датчика эталонной карты (ДЭК) местности в ЦВМ ОСС. Эта ЦВМ, выполняющая основные операции по сравнению карт местности, вырабатывает сигналы, пропорциональные отклонениям ЛА от заданной точки траектории
В зависимости от вида получаемой в системе текущей карты местности различают два основных типа ОСС: системы навигации по рельефу местности и системы навигации по картам местности, В системах навигации по рельефу местности текущая карта обычно является функцией одной координаты и представляет собой линейное изображение (обычно рельеф местности по траектории полета). В системах навигации по картам местности используются изображения местности (например, типа радиолокационного РСА изображения), являющиеся функциями двух координат (азимута и дальности). Системы навигации по рельефу местности более просты в реализации, но обладают ограниченными эксплуатационными возможностями. В системах навигации по картам местности требуется существенно больший объем памяти, чем при навигации по рельефу. Поэтому в таких системах иногда применяют покадровое сравнение карт местности цифровых корреляторах и специальные устройства поиска экстремума двумерной ВКФ. Наиболее перспективной в системах навигации по картам местности считается цифровая обработка информации в реальном масштабе времени, при которой удается, не ухудшая существенно точности системы, уменьшить массо-габаритные характеристики аппаратуры примерно в три-четыре раза.
Заключение В учебном пособии рассмотрены радионавигационные системы автономной навигации летательных аппаратов, позволяющие осуществлять бортовую навигацию без участия опорных станций, размещенных на наземных пунктах, искусственных спутниках земли («Глонасс», «GPS») и т.п. В состав бортового комплекса автономной навигации обязательно входят: радиовысотомер, ДИСС и обзорно-сравнительная система. Все эти системы функционально объединяют радиолокационные принципы измерений. Радиолокационное зондирование сложной поверхностно-распределенной цели (поверхности земли) позволяет получить информацию о высоте полета ЛА, его скорости и текущую карту местности. Качество получаемой информации при этом существенно зависит от характеристик подстилающей поверхности. Поэтому изучение особенностей выбора параметров указанных бортовых радионавигационных средств и их точностные характеристики является важным разделом при изучении радиолокационных и радионавигационных дисциплин. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Баскаков А.И., Жутяева Т.С., Лукашенко Ю.И. Локационные методы исследования объектов и сред. Учебник для вузов. Под ред. проф. А.И. Баскакова. М.: Академия, 2011. 2. Бакулев П.А., Сосновский А.А. Радионавигационные системы. Учебник для вузов. М.: Радиотехника, 2011. 3. Радиотехнические системы. Учебник для вузов. Под ред. проф. Ю.М. Казаринова. М.: Академия, 2008. 4. Бакулев П.А. Радиолокационные системы. Учебник для вузов. М.: Радиотехника, 2008. 5. Сборник задач по курсу Радионавигационных систем. Под ред. П.А. Бакулева и А.А. Сосновского. Учебное пособие для вузов. М.: Радиотехника, 2011. СОДЕРЖАНИЕ Введение.................................................................................................... 3 1. РАДИОВЫСОТОМЕРЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ 1.1. Отражение радиосигналов от земной и морской поверхности. Расчет мощности отраженного сигнала…………………………………. 3 1.2. Принцип действия и основные соотношения для радиовысотомеров с частотной модуляцией…………………………….11 1.3. Анализ ошибок измерения высоты в радиовысотомерах с ЧМ…..22 2. РАДИОЛОКАЦИОННАЯ СИСТЕМА ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ И УГЛА СНОСА (ДИСС) ЛЕТАТЕЛЬНОГО АППАРАТА 2.1. Принцип действия ДИСС и основные соотношения для измерения путевой скорости и угла сноса……………………………….33 2.2. Особенности измерения доплеровской частоты в системе ДИСС……………………………………………………………………….39 2.3. Структурная схема ДИСС-7…………………………………………44 2.4. Радионавигационные системы счисления пути…………………….48
3. РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ СЧИСЛЕНИЯ ПУТИ 3.1. Принципы построения обзорно–сравнительных радио- навигационных систем……….................................................................51 3.2. Системы навигации по рельефу местности………………………...55 3.3. Системы навигации по картам местности………………………….60
Заключение ………………………………………………………………..63
Библиографический список ……………………………………………...64 ИНСТИТУТ РАДИОТЕХНИКИ И ЭЛЕКТРОНИКИ (ИРЭ) ________________________________________________________________
О.А. Алексеев, А.И. Баскаков, В.А. Терехов
РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
|
|||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 759; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.0.24 (0.064 с.) |
 поступают на вход блока фазовой автоподстройки частоты (ФАПЧ). ФАПЧ выделяет частоту
поступают на вход блока фазовой автоподстройки частоты (ФАПЧ). ФАПЧ выделяет частоту  по каждому из каналов (номер канала соответствует номеру луча). Выходные сигналы системы ФАПЧ подаются в бортовое вычислительное устройство и систему индикации. В целях повышения надежности в станции ДИСС-7 применено резервирование наиболее ответственных блоков: блока ФАПЧ и блока передатчика.
по каждому из каналов (номер канала соответствует номеру луча). Выходные сигналы системы ФАПЧ подаются в бортовое вычислительное устройство и систему индикации. В целях повышения надежности в станции ДИСС-7 применено резервирование наиболее ответственных блоков: блока ФАПЧ и блока передатчика.  .
.

 на рис. 3.1) от заданного (точка О). Продольное
на рис. 3.1) от заданного (точка О). Продольное  и поперечное
и поперечное  отклонения ЛА от заданного места на траектории его полета определяются по величине сдвига ЭКМ, который необходим для совпадения эталонной и текущей карт местности. Найденные значения
отклонения ЛА от заданного места на траектории его полета определяются по величине сдвига ЭКМ, который необходим для совпадения эталонной и текущей карт местности. Найденные значения 
 ,
,  . Полученные сигналы используются для коррекции инерциальной навигационной системы ИНС, данные от которой подаются в навигационную ЦВМ (НЦВМ), управляющую полетом ЛА.
. Полученные сигналы используются для коррекции инерциальной навигационной системы ИНС, данные от которой подаются в навигационную ЦВМ (НЦВМ), управляющую полетом ЛА.



