
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Раздел 2. Кинематический анализ плоских механизмов с низшими парами
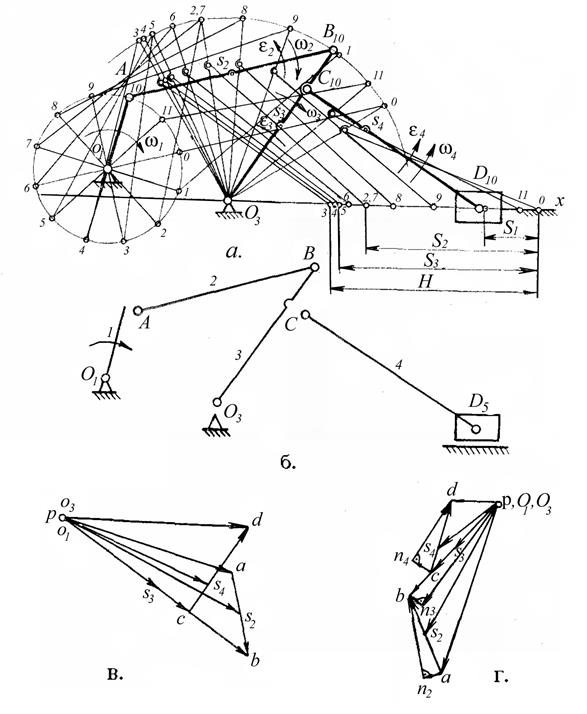
Кинематический анализ Механизмов имеет своей целью изучение теории строения механизмов, исследование движения звеньев с геометрической точки зрения, независимо от сил, вызывающих движение этих тел. Кинематическое исследование состоит в решении следующих задач: 1. Определение класса механизма, т. е. выяснение, из каких структурных групп состоит механизм, и в какой последовательности эти группы присоединяются к исходному механизму 1 класса. 2. Определение перемещений звеньев и траекторий, описываемых точками звеньев. 3. Определение скоростей отдельных точек звеньев и угловых скоростей звеньев. 4.Определение ускорений отдельных точек звеньев и угловых ускорений звеньев. Пример: Дана схема (рис. 2.1), длины звеньев l O1A = 0,1 м, l AВ = 0,28 м, l ВО3 = 0,24 м, l СО3 = 0,18 м, l СD = 0,28 м, n = 400 об/мин. Исследование механизма производится в 10-м положении. По рядок расчета: 1. Выбираем масштаб для построения кинематической схемы, определяемый по формуле
где l O1A = 0,1— истинная длина звена; О1А = 50 мм — длина звена на чертеже. 2. В этом масштабе вычерчиваем планы механизма (рис. 2.1, а) в 12 равноотстоящих положениях кривошипа. За нулевое следует принять одно из крайних положений механизма. Для этого необходимо найти длины отрезков всех остальных звеньев механизма, которые будут изображать их на чертеже:
и так далее. Для того, чтобы найти правое крайнее положение механизма, нужно из точки О1; отрезком длиной 01А+АВ сделать засечку на дуге радиуса О3В. Получим точку В0 для нулевого положения. Затем найдем все остальные положения звеньев механизма. С помощью засечки длиной АВ—01А на дуге радиуса О3В определим левое крайнее положение точки В и обозначим ее через В3. 3. Производим структурный анализ. Так как заданный механизм плоский и относится к третьему семейству, то степень свободы механизма определяется по формуле Чебышева
где n — число подвижных звеньев, равное в данном механизме 5; p5—число кинематических пар 5-го класса (низшие кинематические пары). В данном механизме их 7 (0—1, 1—2, 2—3, 3—4, 3—0, 4—5, 5—0); р4—число кинематических пар 4-го класса (высшие кинематические пары), их в механизме нет. Тогда:
Рис. 2.1. Кинематическое исследование рычажного механизма методом планов:
а —кинематическая схема; б — группы Ассура; в — план скоростей; г — план ускорений
В данном механизме нет лишних степеней свободы и пассивных связей. Проведем разложение механизма на структурные группы Ассура. Разложение следует начинать с отделения группы, наиболее отдаленной от ведущего звена. Разложение будет правильным, если после отделения каждой группы оставшаяся часть представляет собой кинематическую цепь с тем же числом степеней свободы, что и исходный механизм. Поэтому разложение необходимо начать с попытки отделения групп 2-го класса (двух-поводковых). В случае неудачи следует отделить группу 3-го класса или 4-го класса. На рис. 3.1,б показано разложение механизма на структурные группы. Формула строения механизма имеет вид 1(0,1)®221 (2,3)®222 (4,5), т. е. к исходному механизму 1-го класса (звенья 0,1) присоединяются группы Ассура 2-го класса, состоящие из звеньев 2 — 3 (2-го порядка, 1-го вида) и 4— 5 (2-го порядка, 2-го вида). По классификации Ассура-Артоболевского данный механизм является механизмом 2-го класса. Структурный анализ механизма всегда предшествует кинематическому исследованию. Кинематическое исследование механизма необходимо начинать с механизма 1-го класса, т. е. с ведущего звена. Задачи кинематического и силового исследования механизма в каждом положении его ведущего звена решаются для каждой группы Ассура отдельно, согласно формуле строения. Рассмотрим построение кинематических диаграмм. По найденным на планах механизма (рис. 2.1,а) положениям ведомого звена 5 вычерчиваем график перемещения ползуна D (рис. 2.2,а), начиная от крайнего правого положения. Так как по условию w1=const, то ось абсцисс является не только осью углов (j поворота кривошипа, но и осью времени t). Время оборота ведущего звена (кривошипа O1A) в секундах, найдем по формуле
Это время рекомендуется изображать на оси абсцисс отрезком x = 0—12 = 120...180 мм; тогда масштаб времени, с/мм
Масштаб перемещений, откладываемых по оси ординат, берем таким же, что и масштаб длины на схеме механизма, или изменяем. Дифференцируя график перемещений, получим график изменения скорости ведомого звена. Дифференцирование проводим графически методом хорд.
Последовательность построения графика VD = VD (t) (рис.2.2,б): 1. Проводим секущие (хорды) 0a, аb, bс, сd, df и т. д. 2. Выбираем полюс рv на расстоянии Hv, которое рекомендуется брать порядка 20...40 мм, и проводим из него лучи 1, 2, 3, 4 и т. д., параллельные секущим 0a, аb, bс, сd, df и т.д., до пересечения с осью ординат. 3. Из точек пересечения 1, 2, 3 и т. д. проводим горизонтали до пересечения с вертикальными прямыми, проведенными из середин 0—1, 1—2 и т. д. отрезков времени Dt. 4. Точки пересечения 1', 2', 3', 4' и т. д. соединяем плавной кривой. Это будет кривая изменения скорости ведомого звена. 5. Вычисляем масштаб скорости, мс-1/мм,
где w1 - угловая скорость звена 1,
ms — масштаб перемещений; mt — масштаб времени; Hv—полюсное расстояние, мм. Масштаб графика скорости зависит от выбора полюсного расстояния. Чем больше полюсное расстояние, тем меньше численный масштаб и тем большие ординаты имеет график скорости. Начальная и конечная точки графика за период цикла движения механизма должны иметь одинаковые ординаты (в данном случае они равны нулю). Аналогичным способом получим кривую ускорения (рис.2.2,в), дифференцируя график скорости. График ускорения, построенный путем графического дифференцирования кривой графика скорости, изображает закон изменения лишь касательного ускорения. Только в случае прямолинейного движения точки, когда нормальное ускорение равно нулю, построенный график отобразит (как в нашем примере) закон изменения полного ускорения. Начальная и конечная точки графика ускорения за время цикла движения механизма должны иметь одинаковые ординаты. Масштаб графика ускорений, мс-1/мм, определяется по формуле
Рис. 2.2. Кинематические диаграммы Рассмотрим построение плана скоростей для 10-го положения (рис. 2.1,в). Величина скорости точки A, м/с, перпендикулярной кривошипу 01A, определяется по формуле
Для построения плана скоростей выбираем на плоскости произвольную точку р — полюс плана скоростей, который является началом плана скоростей. Из полюса откладываем отрезок рa, изображающий на плане скоростей вектор скорости VA. Он перпендикулярен звену 01А. Тогда масштаб плана скоростей, мс-1/мм
Рассмотрим первую группу звеньев (звенья 2 и 3). Для определения скорости точки В напишем два векторных уравнения согласно теореме о сложении скоростей при плоскопараллельном движении:
Векторы относительных скоростей VВA и VBO3 известны только по направлению. Вектор относительной скорости VВA перпендикулярен звену AВ, а вектор VВОЗ — звену О3В. Точка О3 неподвижна, поэтому V03=0. Таким образом, рассматриваемая группа присоединена к двум точкам, скорости которых известны и по направлению, и по величине. В соответствии с векторным уравнением (2.3) на плане скоростей проводим через точку (а) прямую, перпендикулярную звену AВ. Это есть линия вектора VBA. В соответствии с векторным равенством (2.4) проводим через точку О3 на плане скоростей прямую, перпендикулярную звену O3B. Это будет линия вектора VВОЗ. Точка (в) пересечения этих двух прямых и будет определять конец вектора, изображающего на плане скоростей вектор Vв. Чтобы определить истинную величину любого из векторов в м/с, надо его длину умножить на масштаб плана скоростей.
Например,
Для определения скорости точки С воспользуемся тем, что картина относительных скоростей образует на плане скоростей фигуру, подобную фигуре звена и повернутую относительно ее на 90° в сторону вращения звена. В соответствии с этим отрезок рb плана скоростей разделим в отношении О3В: O3C, т. е.
Откуда Величина скорости точки С, м/с
Перейдем к группе (звенья 4 и 5). Для определения скорости точки D напишем векторные уравнения
Вектор относительной скорости VDC и вектор абсолютной скорости VD не известны по величине, но известны по направлению. В соответствии с векторным уравнением через точку С на плане скоростей проводим прямую, перпендикулярную звену CD. Это будет линия относительной скорости, где далее проводим линию параллельно направляющей Х-Х. Точка d, пересечения этих прямых и есть искомая точка. Истинная величина скорости точки D, м/с
Определим угловые скорости. Угловая скорость звена 2, рад/с, определяется по формуле
Чтобы определить направление угловой скорости w2, следует вектор относительной скорости VBA перенести в точку В механизма, а точку A мысленно закрепить. Тогда вектор VBA будет стремиться вращать звено 2 по ходу часовой стрелки. Это и будет направление угловой скорости w2 Остальные угловые скорости:
Угловая скоростьw3 направлена по часовой стрелке, w4 — против. Рассмотрим построение плана ускорений. Для первой группы звеньев (звенья 2, 3), ускорение точки A, м/с2 можно определить по величине и направлению. Так как w1=const, то
Точка О3 неподвижна, следовательно, ускорение ее равно нулю. Таким образом, группа присоединена к точкам, ускорения которых известны. Для построения плана ускорений выбираем на плоскости произвольную точку p — полюс плана ускорений (рис.3.1,г). Из полюса откладываем отрезок pа, изображающий на плане ускорений вектор ускорений точки A - a A. Ускорение a A направлено вдоль звена O1A от точки A к точке O1 (к центру вращения звена I). Тогда масштаб плана ускорений, мс-1/мм,
Для определения ускорения точки В напишем два векторных уравнения, рассмотрев движение точки В относительно точек A и О3:
Нормальные ускорения можно определить по величине и направлению. Величина вектора
Вектор a nBA направлен вдоль звена AВ от точки В к точке A (к центру относительного вращения).
Величина вектора WBO3определяется по формуле
Вектор a nBA направлен вдоль звена ВA от точки В к точке A как к центру вращения. Тангенциальные ускорения не известны по величине, но известны по направлению. Из конца вектора a A, ускорения точки A проводим прямую, параллельную звену AВ — вектор нормального ускорения точки В относительно точки A(a nBA), масштабная величина которого an2 = a nBA /mW, измеряется в миллиметрах. Через точку n2 проводим направление вектора WtBA перпендикулярно звену ВA. Затем строим сумму векторов правой части векторного уравнения (2.11). Для этого проводим из полюса параллельно звену О3В вектор a nBO3. Его масштабная величина на плане ускорений pn3 = a nВОЗ/mW. Затем через точку n3 перпендикулярно звену О3В проводим вектор тангенциального ускорения a tBO3. Пересечение векторов a tBO3 и a tBA определит точку b. Вектор n2b выражает ускорение a BA, а вектор n3b выражает ускорение a tBO3 Если соединить точку а с точкой b на плане ускорений, то вектор аb выразит полное относительное ускорение a BA, так как является геометрической суммой векторов a nBA и a tBA. Подобно этому вектор o3b на плане ускорений представляет масштабное выражение вектора полного относительного ускорения a BO3. И, наконец, вектор pb выражает на плане ускорений вектор абсолютного ускорения точки В. Для определения ускорения точки С воспользуемся свойством подобия. На основании теоремы подобия имеем
Тогда Для определения ускорения точки D напишем векторное уравнение
Рассмотрим векторы, входящие в данное уравнение. Вектор WC мы определили ранее. Величина вектора WnDC, м/с2, определяется по формуле
а остальные векторы известны только по направлению. Достраиваем план ускорений. Из точки с параллельно звену DC проводим вектор a nDC, масштабная величина которого, мм, на плане ускорений равна cn4 = a nDC /mW Через точку перпендикулярно звену CD проводим вектор a tDC, а через точку p параллельно направляющей — вектор a D. На пересечении векторов a tDC и a D получим точку d, которая определит их величины. Полученный вектор n4d на плане ускорений выражает в масштабе ускорение a tDC, а вектор pd является изображением вектора ускорения a D. Если соединить точку (с) с точкой (d), то вектор сd будет изображать полное относительное ускорение a DC. Определим угловые ускорения. Ведущее звено 7 вращается с постоянной угловой скоростью, поэтому его угловое ускорение e1=0. Угловое ускорение звена 2, с-2, равно величине тангенциального (касательного) ускорения a tBA, деленной на длину звена AB, т.е. ___ a tВА n 2 b m a e 2 = ¾¾¾¾ = ¾¾¾¾¾. (2.17) l ВА l ВА Чтобы определить направление углового ускорения e2, вектор относительного ускорения a tBA следует перенести с плана ускорений в точку В механизма, а точку A мысленно закрепить. Тогда вектор a tBA будет стремиться вращать звено 2 против хода часовой стрелки. Это и будет направление e2. Подобным образом находим угловые ускорения остальных звеньев;
___ a tВОЗ n 3 b ·m a e3 = ¾¾¾¾ = ¾¾¾¾¾; (2.18) l ВОЗ l ВОЗ ___ a tDC n 4 b ·m a e4 = ¾¾¾¾ = ¾¾¾¾¾; (2.19) l DC l DC e3 и e4 направлены против хода часовой стрелки.
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-02-05; просмотров: 265; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.79.70 (0.042 с.) |












 (2.1)
(2.1) .
. (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4)



 (2.5)
(2.5) (2.6)
(2.6)
 (2.6)
(2.6) (2.7)
(2.7) (2.8)
(2.8) (2.9)
(2.9) (2.10)
(2.10) (2.11)
(2.11) (2.12)
(2.12) (2.13)
(2.13) (2.14)
(2.14)

 (2.15)
(2.15) (2.16)
(2.16)


