Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Структурный анализ механизма поршневого компрессора.Стр 1 из 3Следующая ⇒
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по кинематическим и динамическим исследованиям механизмов насосов и компрессоров на тему:
Автор проекта Мелёхина М.Ю. Специальность140401, техника и физика низких температур Группа 08-М-ТФ1 Руководитель проекта Смелягин А.И.
Краснодар, 2010 Кинематический анализ механизма движения поршневого компрессора. 1. Определение скоростей и ускорений точек и угловых скоростей звеньев механизма методом полюса.
При использовании данного метода исследования можно определить мгновенные значения скоростей точек, угловых скоростей звеньев для заданного положения механизма, определяемого углом поворота φ1, ведущего звена. Основной недостаток данного метода заключается в том, что угловая скорость ведущего звена принимается равной постоянному значению. Проанализируем механизм, используя метод полюса.
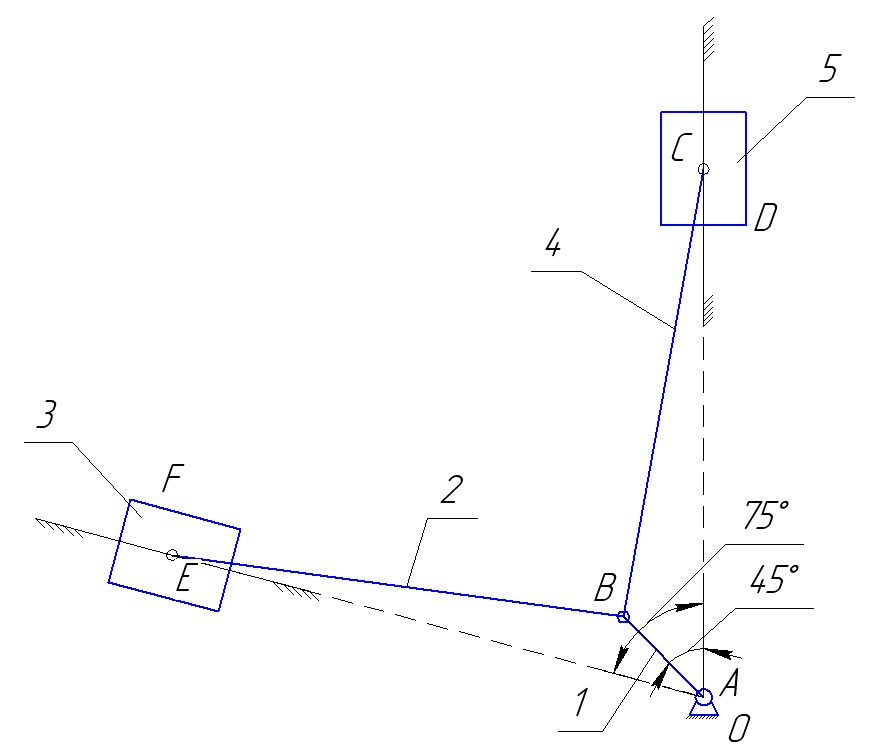
Механизм состоит из следующих звеньев: кривошип АВ=L1=0.2; шатунов ВС=ВЕ=L2=L4=0.7 поршней Е и С. α=75° - угол развала осей цилиндров, φ=45°, n=1000 об/мин. 1.1 Угловая скорость звена 1:
1.2 Скорость точки В:
1.3 Скорость точки Е:
Спроецируем равенства на оси координат: На На т.к. механизм построен в масштабе, углы
Направление угловой скорости 1.4 Скорость точки С:
Спроецируем на координатные оси: На На
т.к. механизм построен в масштабе, углы
Направление угловой скорости
Рис. 3. План скоростей механизма
1.5 Ускорение точки В:
1.6 Ускорение точки Е:
Спроецируем неравенство на координатные оси: На На Так как механизм построен в масштабе, углы
Направление 1.7 Ускорение точки С:
Спроецируем равенство на оси координат: На На Так как механизм построен в масштабе, углы
Знак «минус» показывает, что вектор
Направление
Рис. 4. План ускорений механизма
2. Определение скоростей точек звеньев механизма методом мгновенного центра скоростей. Изображаем схему механизма в масштабе.
Рис. 5. План скоростей механизма
2.1 Скорость точки В:
2.2 МЦС звена 2 находится на пересечении перпендикуляров, проведённых к скоростям
Так как механизм построен в масштабе, расстояния
Направление 2.3 Для нахождения МЦС звена 4 проводим перпендикуляры к векторам
Так как механизм построен в масштабе, расстояния
Направление
КИНЕМАТИЧЕСКИЙ АНАЛИЗ ПОРШНЕВОГО КОМПРЕССОРА ДИНАМИЧЕСКИЙ АНАЛИЗ МАШИНЫ Изображаем схему механизма в любом положении, кроме крайних. Массы сосредотачиваем посередине звена. Обозначаем моменты инерции звеньев относительно центров масс звеньев. Прикладываем силы тяжести. Рисуем индикаторную диаграмму. Внутри цикла установившегося движения угловая скорость начального звена машины периодически меняется из-за постоянного изменения нагрузок, что приводит нежелательной неравномерности движения. Неравномерность движения начального звена характеризуется коэффициентом неравномерности движения δ, который не должен превышать допустимого значения [δ]. Для снижения колебаний угловой скорости начального звена до допустимых пределов в машине предусматривают маховик, который с целью уменьшения его размеров устанавливают на быстроходном валу. При анализе динамики машин и определении момента инерции маховика Данные к расчёту:
I1=0.032 (кг*м), I2=0.18 (кг*м)
Рис. 8. а - схема механизма, б - динамическая модель механизма. СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА Силовой анализ механизма проводится для того, чтобы впоследствии по найденным силам (моментам) произвести расчет на прочность элементов кинематических пар и звеньев механизма, а также правильно подобрать привод. Анализ механизмов проводят как аналитическими, так и графическими методами. В данной работе произведем силовой анализ графическим методом.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
AB = 0.2 (м) BC = BE = 0.7 (м)
Угол между осями
ВВЕДЕНИЕ
Компрессор — устройство для сжатия и подачи воздуха или другого газа под давлением. Область применения компрессорной техники —технологические процессы химической, нефтехимической, нефтеперерабатывающей, газовой, металлургической, пищевой промышленности и ряде других отраслей. По принципу действия и основным конструктивным особенностям различают компрессоры: — Поршневые; — Ротационные; — Центробежные; — Осевые; — Струйные; — Мембранные. Поршневой компрессор в основном состоит из рабочего цилиндра и поршня; имеет всасывающий и нагнетательный клапаны, расположенные обычно в крышке цилиндра. Для сообщения поршню возвратно- поступательного движения s большинстве поршневых компрессоров имеется кривошипно-шатунный механизм с коленчатым валом, который получает вращательное движение от электродвигателя. Поршневые компрессоры бывают одно- и многоцилиндровые, с вертикальным, горизонтальным, V- или W-образным и другим расположением цилиндров, одинарного и двойного действия (когда поршень работает обеими сторонами), а также одноступенчатого или многоступенчатого сжатия. Работает он следующим образом: 1. Открывается всасывающий клапан. 2. Поршень, создавая разрежение, движется вниз. Газообразный хладагент с низким давлением и температурой всасывается в компрессор. 3. После заполнения камеры компрессора всасывающий клапан закрывается. Поршень движется вверх, сжимая газ. 4. Открывается нагнетательный клапан и газ под большим давлением (до 25 атм) и температурой (до 90"С) устремляется в конденсатор. После этого нагнетательный клапан закрывается и цикл повторяется. Поршневые компрессоры предназначены для химической промышленности, холодильных установок, питания пневматических систем, гаражного хозяйства Компрессоры могут эксплуатироваться в составе стационарных или передвижных машин или установок. Соответственно этому различают стационарные, передвижные, переносные, прицепные, самоходные, транспортные (авиационные, автомобильные, судовые, железнодорожные) компрессоры. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Левитский Н. И. Теория механизмов и машин. - М.: Наука, 1979. 2. Артоболевский И. И. Теория механизмов и машин. - М.: Наука, 1988. 3. Смелягин А. И. Структура, структурный анализ и синтез машин и механизмов. - Новосибирск: Изд-во НГТУ, 1999. 4. Смелягин А. И. Структура машин и механизмов. — Новосибирск: Изд-во НГТУ, 2001. 5. А. И. Смелягин Теория машин и механизмов, Курсовое проектирование. — Москва, 2003. 6. А. А. Яблонский, В. М. Никифорова Курс Теоретической Механики. Санкт-Петербург, 2001.
Оглавление Техническое задание.................................................................................................................... 3 Введение........................................................................................................................................ 4 Структурный анализ механизма поршневого компрессора............................................... 5 Кинематический анализ поршневого компрессора............................................................ 11
Кинематический анализ механизма графоаналитическим методом....................... 11 1. Определение скоростей и ускорений точек и угловых скоростей механизма методом полюса. 11 2. Определение скоростей точек звеньев механизма методом мгновенного центра скоростей....... 14 Кинематический анализ аналитическим методом........................................................... 16 Определение крайних (мёртвых) положений механизма............................................... 16 Метод векторных замкнутых контуров............................................................................. 16 Динамический анализ машины.............................................................................................. 19 Определение параметров динамической модели..................................................... 19 1. Приведённый момент инерции и его производная........................................................................ 19 2. Приведённый момент сил сопротивления...................................................................................... 20 3. Определение приращения кинетической энергии механизма..................................................... 21 4. Определение момента инерции маховика...................................................................................... 22 5. Определение закона движения начального звена и момента инерции маховика по диаграмме Виттенбауэра..................................................................................................................................... 22 6. Определение угловой скорости и углового ускорения начального звена механизма.............. 23 Силовой анализ механизма...................................................................................................... 24 Силовой анализ механизма графическим методом..................................................... 24 1. Определение сил (моментов) инерции................................................................................................. 24 2. Силовой анализ структурной группы 2-3......................................................................................... 25 3. Силовой анализ элементарного механизма и определение уравновешивающего момента......... 27 4. Определение уравновешивающего момента методом рычага Жуковского.............................. 28 Список использованной литературы.................................................................................... 30 Оглавление.................................................................................................................................. 31
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по кинематическим и динамическим исследованиям механизмов насосов и компрессоров на тему:
Автор проекта Мелёхина М.Ю. Специальность140401, техника и физика низких температур Группа 08-М-ТФ1 Руководитель проекта Смелягин А.И.
Краснодар, 2010 Структурный анализ механизма поршневого компрессора.
1. Механизм состоит из:
Рис. 1. Механизм поршневого компрессора.
- кривошип 1; - шатун 2,4; - ползун 3,5;
Положение точек и звеньев механизма определяется углом поворота φ ведущего звена – кривошипа (1). 2. Анализ расчётной схемы показал, что в исследуемом механизме отсутствуют разнесённые кинематические пары и сложные шарниры.
3. Классификация кинематических пар
Исполнительный механизм состоит только из одноподвижных кинематических пар. P1 = 7, где P1 – число одноподвижных кинематических пар. p = p1= 7, где p – общее число пар в механизме.
4. Классификация звеньев
Механизм состоит из: четырёх (n2 = 4) двухвершинных (t = 2) линейных звеньев: 2;4;3;5, одного (n3 = 3) трёхвершинного звена: 1, которое является базовым (T =3), пять (n = 5) подвижных звеньев. 5. Находим число присоединений к стойке. Механизм имеет три (S = 3) присоединений к стойке. 6. Выделяем в механизме самостоятельные структурные группы, простые, элементарные и с разомкнутыми цепями в механизме. В исследуемом сложном механизме можно выделить один элементарный механизм. 7. Выделяем простые, стационарные и подвижные механизмы. Исследуемый механизм в своём составе имеет только простые стационарные механизмы.
8. Выявляем звенья закрепления и присоединения. В исследуемом механизме звенья закрепления и присоединения отсутствуют. 9. Классифицируем механизм. Механизм имеет постоянную структуру, является сложным и однотипным, состоит из одного элементарного механизма, к которому присоединены четыре структурные группы (ступени). Сложный механизм имеет в составе только замкнутые кинематические цепи. 10. Определяем подвижность механизма. Анализ подвижных звеньев механизма и элементов кинематических пар показывает, что сложный механизм существует в трёхподвижном (П = 3) пространстве, в котором разрешены следующие простейшие независимые движения. Простейшие независимые движения: два поступательных движения X и Y вдоль соответствующих осей и одно вращательное φ вокруг оси Z Формула для определения подвижности примет вид: W = 3n – 2p1 – p2, в исследуемом механизме двухподвижные кинематические пары отсутствуют, следовательно p2 = 0. Количество замкнутых контуров определим как:
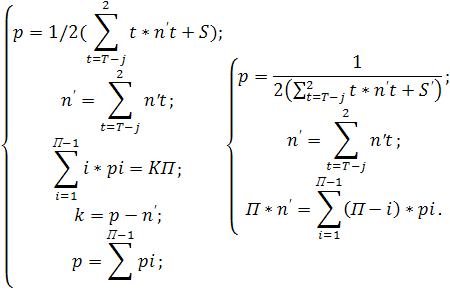
k = p – n. В исследуемом механизме количество замкнутых контуров равно k = 5 – 4 = 1. Подвижность исследуемого механизма равна W = 3·5 - 2·7 = 1. 11. Строим и проводим анализ структурной математической модели механизма. Проверяем, соответствует ли исследуемый механизм структурной математической модели. Механизм имеет семь (p = 7) одновершинных (p1 =7) кинематических пар, пять (n =5) подвижных звеньев, из них четыре (n2 = 4) двухвершинных (t =2) звеньев, одно (n3 = 1) трёхвершинное (t = 3) звено, базовое (Т = 3) трёхвершинное (t = 3), три (S = 3) присоединений к стойке; звеньев в закреплении нет (z = 0). 12. Подставим эти данные в структурную математическую модель.
Поскольку уравнения моделей превратились в тождества, то исследуемое устройство имеет правильную структуру и является механизмом. 13. Выделяем механизм I класса.В соответствии с классификацией И. И. Артоболевского механизм I класса для исследуемого механизма совпадает с элементарным механизмом. 14. Выделяем структурные группы Ассура. В исследуемом механизме можно выделить две одинаковые структурные группы.
Данные структурные группы имеют: два подвижных звена (n’=n’’=2), причём все звенья двухвершинные (t=2) и значит базовое звено также имеет две вершины (T=2); три (р=3) одноподвижных (р1=3) кинематических пары, две из которых внешнии. (S’=2) 15. Проверяем, соответствуют ли выделенные структурные группы их математическим моделям.
Поскоку все математические модели превратились в тождества => выделенные КЦ являются структурными группами Ассура. 16. Проверяем, не распадаются ли выделенные структурные группы на более простые.Из структурной схемы видно, что выделенные структурные группы являются наиболее простыми для трехподвижного пространства, в котором существует данный механизм. 17. Классификация структурных групп по И. И. Артоболевскому.
18. Определяем класс сложного механизма поршневого компрессора. Механизм относится ко ІІ классу.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-02-07; просмотров: 887; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.200.136 (0.1 с.) |


 ;
; 
 -
- 

 измеряем на схеме:
измеряем на схеме: 









 измеряем на схеме:
измеряем на схеме: 



 определим по направлению
определим по направлению  .
.


 (29.6)²·0.7=613.3 м/
(29.6)²·0.7=613.3 м/ 


 и
и  замеряем на схеме:
замеряем на схеме: 



 определяем по
определяем по  .
.



 замеряем на схеме:
замеряем на схеме: 

 направлен в противоположную сторону.
направлен в противоположную сторону.

 .
.


 Скорости точек пропорциональны расстояниям до МЦС:
Скорости точек пропорциональны расстояниям до МЦС:
 измеряем по схеме:
измеряем по схеме:



 Скорости точек сведены соотношением:
Скорости точек сведены соотношением:





 вместо реального механизма рассматривают его одномассовую динамическую модель. Динамическая модель механизма состоит из одного, обычно начального звена, к которому приведены силы, движущие
вместо реального механизма рассматривают его одномассовую динамическую модель. Динамическая модель механизма состоит из одного, обычно начального звена, к которому приведены силы, движущие  и (моменты) сопротивления
и (моменты) сопротивления  , действующие на звенья машины, а также все моменты инерции звеньев
, действующие на звенья машины, а также все моменты инерции звеньев  . Начальное звено часто называют звеном приведения.
. Начальное звено часто называют звеном приведения. l1 =0.2 (м), l2 =0.7 (м), m1=0.8 (кг), m2=2 (кг), m3=0.5 (кг),
l1 =0.2 (м), l2 =0.7 (м), m1=0.8 (кг), m2=2 (кг), m3=0.5 (кг), Fmax= 3000 (H)
Fmax= 3000 (H)
 ;
;
 (кг)
(кг) (кг)
(кг) (кг)
(кг)