Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основные устройства систем автоматического управления. Принцип действия систем АУСтр 1 из 11Следующая ⇒
Билет 1 Основные устройства систем автоматического управления. Принцип действия систем АУ
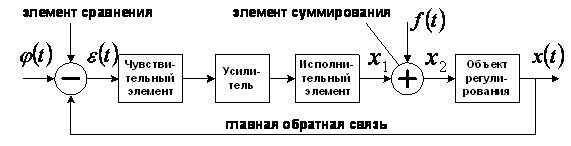
В процессе работы на систему действует внешние воздействия: Принцип работы любой САУ схематично может быть представлен следующим образом. В элементе сравнения сопоставляются действительное и заданное значение регулируемой величины. Выходная величина элемента сравнения ε(t)
Отклонение регулируемой величины от заданного значения может произойти как за счет действия внешнего возмущения Величина ошибки системы измеряется чувствительным элементом (датчиком). В большинстве САУ сигнал на выходе с чувствительного элемента по величине мал для приведения в действие исполнительного элемента и поэтому предварительно усиливается в усилителе. Исполнительный элемент так действует на объект регулирования, чтобы регулируемая величина была равна заданному значению. Если это условие не выполняются, то САУ неработоспособна. Основной особенностью систем АУ является наличие замкнутой цепочки воздействий между элементами системы. Объект регулирования является неотъемлемой частью всей системы автоматического управления. Исследование Динамических процессов в системах АУ при приложение к системе воздействий произвольной формы Динамические характеристики определяют свойства звена или системы при изменении во времени входных и выходных величин. Назначение “характеристика” соответствует графическому представлению, “функция “- аналитическому. Классификация: Временные хар-ки – представляют собой реакции звена или системы на типовые воздействия при нулевых начальных условиях. Переходная функция(характеристика) – это переходной процесс изменения выходной величины при единичном ступенчатом воздействии на входе и нулевых начальных условиях. Билет 2
Билет 3 Билет 4 Билет 5 Билет 6 Дифференциальные уравнения элементов и систем Преобразование Лапласа Преобразова́ние Лапла́са — интегральное преобразование, связывающее функцию
Билет 9 Билет 10 Билет 11 Билет 12 Замена соединений звеньев эквивалентным звеном. Эквивалентные преобразования структурных схем систем. Одноконтурные структурно-динамические схемы АС представляют собой замкнутую цепь последовательно соединенных звеньев и определение передаточных функций по таким схемам не представляет больших затруднений. Многоконтурные структурно-динамические схемы характеризуются наличием звеньев, охваченных обратными связями. Поэтому для определения передаточных функций возникает необходимость в преобразовании таких схем к эквивалентным одноконтурным схемам. В общем случае преобразование многоконтурных схем к эквивалентным одноконтурным схемам сводится к замене параллельного соединения и соединения с обратной связью эквивалентными звеньями, а также к перестановке различных элементов схемы (точек съема сигналов, сумматоров, звеньев) как по ходу, так и против хода сигнала. Основной принцип перестановки элементов схемы состоит в том, чтобы все входные и выходные величины исходного и преобразованного участка схемы остались неизменными. Выполнение этого принципа при структурных преобразованиях обеспечивает получение одноконтурной схемы, которая эквивалентна (тождественно равноценна) исходной многоконтурной схеме. Применение правил замены позволяет так же решить другую важную практическую задачу. Преобразование многоконтурной структурной схемы может быть произведено таким образом, чтобы упростить вид описывающей ее передаточной функции. Позиционные регуляторы (Пз) Позиционными наз. такие регуляторы, у которых вых. величина принимает одно из дискретных значений в зависимости от сигнала рассогласования. Применение Пз-регулятора возможно при допустимости автоколебательного процесса в системе при определенных значениях амплитуды установивш. колебания.
Билет 13 Билет 14 Объектом регулирования называют ту часть системы, которая начинается в месте измерения и кончается в месте приложения регулирующего воздействия. Таким образом, объект регулирования - это та часть тракта регулирования, которая представляет собой участок системы, подлежащий воздействию в соответствии с поставленной задачей.
Статические свойства объекта - его свойства в установившемся состоянии, т е при неизменных вх и вых сигналов. Зависимость установившегося значения вых сигнала от входного наз статической хар-кой объекта. Билет 16 Билет 17 Билет 18 Билет19 Билет 20 Билет 21. Основные элементы формирования законов регулирования: преобразующие исполнительные механизмы и корректирующие обратные связи. Зависимость изменения выходной величины регулятора, от рассогласования представляет собой закон регулирования. К линейным законам относятся: Пропорциональный(П закон), интегральный(и закон),дифференциальный(Д закон), пропорционально-интегральный(пи), пропорционально-дифференциальный(ПД),Пропорционально-интегрально-дифференциальный закон.Клас-ия регуляторов по принципу действия: бывают прямого и не прямого действия. В регуляторах прямого действия не используются посторонние источники энергии. В регуляторах непрямого действия используются дополнительные источники энергии для формирования выходного сигнала в в зависимости от использования энергии регуляторы не прямого действия делятся на пневматические, электрические, гидравлические. По виду регулирования параметров регуляторы делятся на: специальные и универсальные. Специалные предназначены для регулирования конкретного параметра (давление, температура, уровень).
Универсальные предназначены для регулирования технологических процессов. П-регулятор У=ек- закон регулирования к- настроичный параметр. Недостатком регулятора является наличие статической ошибки ПИ-регулятор(закон) в Пи законе выходная величина пропорциональна отклонению и интегралу этого отклонения Закон регулирования при скачкообразном отклонении текущего параметра от заданного работает в след порядке сначала под действием пропорциональной составляющей привод систему к новому состоянию равновесия а затем, при полмощи интегральной составляющей ликвидируют отключение. ПД- НАЗЫВАЮТСЯ РЕГУЛЯТОРЫ У КОТОРЫХ ВЫХОдная величина пропорциональна рассогласованию и скорости измению ПИД – регулятор сочитает в себе все 3 закона у которого выходная величина пропорциональна рассогласованию интегралу и скорости рассогласования Корневые методы оценки качества
Линия 1 определяет запас устойчивости, а линия 2 определяет Колебательность. Если корни расположены в области ограниченной линиями 1 и 2, то система удовлетворяет заданным s0 и m. Билет 22 настроечный параметр П регулятора, вместо К может быть обратная ему величина которая называется пределом пропорциональности =1/к * 100% При равенстве текущего и заданного значения при е=0 выходная величина регулятора так же равна нулю. Орган исполнительного устройства (клапан, задвижка) должен занимать одно из крайних положений откр-закр что бы обеспечить регулирование необходимо какое то промежуточное положение поэтому в регуляторах вводятся дополнительные составляющие на выходе что бы выполнить условие при Хз =Хт У1=У2 Тгда уравнение рано у=к*е+уо 36. управление качеством следует рассматривать как целенаправленный процесс скоординированных воздействий на объекты управления для установления, обеспечения и поддержания необходимого его уровня качества, удовлетворяющего требованиям потребителей и общества в целом. Переходный процесс — в теории систем представляет реакцию динамической системы на приложенное к ней внешнее воздействие с момента приложения этого воздействия до некоторого установившегося значения во временной области. Изучение переходных процессов — важный шаг в процессе анализа динамических свойств и качества рассматриваемой системы. Примерами внешнего воздействия могут быть дельта-импульс, скачок или синусоида.
Характеристики Важнейшие характеристики переходных процессов переходной функции (реакции системы на единичное возмущение): Перерегулирование Показывает максимальный «выброс» выходного сигнала системы по амплитуде по отношению к установившемуся значению. Чем больше перерегулирование, тем более система склонна к колебаниям. Время переходного процесса Время, необходимое выходному сигналу системы для того, чтобы приблизиться к своему установившемуся значению. Обычно пределы такого приближения составляет 1-10 % от конечного значения Колебательность Характеризует склонность системы к колебаниям и определяется как модуль отношения амплитуд второго колебания к амплитудам первого колебания умноженное на 100%. Установившаяся ошибка Установившаяся ошибка системы — разница между предполагаемым и реальным значением выходного сигнала при времени, стремящемся к бесконечности. В идеальных астатических системах установившаяся ошибка равна нулю. Качество САУ определяется совокупностью свойств обеспечивающих эффективное функционирование объекта управления и управляющего устройства, т.е всей системы. Св-ва составляющие эту совокупность и имеющие количественные измерители называются показателями качества системы. Качество САУ можно оценить общепринятыми показателями (вес, габариты, цена, надежность). В ТАУ для оценки качества рассматривают статические и динамические св-ва системы, они предопределяют точность поддержания упр.величины на заданном уровне в установившемся и переходном режимах. Св-ва системы статические и динамические, выраженные в количественной форме называ.т показателями качества управления Выделяют три типовых процесса регулирования: 1. Апериодический процесс с минимальным временем регулирования. 2. Процесс с 20%-ным перерегулированием. 3. Процесс, обеспечивающий минимум интегрального критерия качества. Билет 23. Билет 1 Основные устройства систем автоматического управления. Принцип действия систем АУ
В процессе работы на систему действует внешние воздействия: Принцип работы любой САУ схематично может быть представлен следующим образом. В элементе сравнения сопоставляются действительное и заданное значение регулируемой величины. Выходная величина элемента сравнения ε(t)
Отклонение регулируемой величины от заданного значения может произойти как за счет действия внешнего возмущения Величина ошибки системы измеряется чувствительным элементом (датчиком). В большинстве САУ сигнал на выходе с чувствительного элемента по величине мал для приведения в действие исполнительного элемента и поэтому предварительно усиливается в усилителе. Исполнительный элемент так действует на объект регулирования, чтобы регулируемая величина была равна заданному значению. Если это условие не выполняются, то САУ неработоспособна. Основной особенностью систем АУ является наличие замкнутой цепочки воздействий между элементами системы. Объект регулирования является неотъемлемой частью всей системы автоматического управления. Исследование Динамических процессов в системах АУ при приложение к системе воздействий произвольной формы Динамические характеристики определяют свойства звена или системы при изменении во времени входных и выходных величин. Назначение “характеристика” соответствует графическому представлению, “функция “- аналитическому. Классификация: Временные хар-ки – представляют собой реакции звена или системы на типовые воздействия при нулевых начальных условиях. Переходная функция(характеристика) – это переходной процесс изменения выходной величины при единичном ступенчатом воздействии на входе и нулевых начальных условиях. Билет 2
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 507; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.116.42.208 (0.04 с.) |
 -управляющее воздействие (заданное значение регулируемой величины, которое в общем случае может изменяться во времени);
-управляющее воздействие (заданное значение регулируемой величины, которое в общем случае может изменяться во времени);  - внешнее возмущение (изменение условий теплообмена в печи, изменение нагрузки на валу двигателя, действие порыва ветра на летательный аппарат и т. д.).
- внешнее возмущение (изменение условий теплообмена в печи, изменение нагрузки на валу двигателя, действие порыва ветра на летательный аппарат и т. д.). является ошибкой САУ:
является ошибкой САУ: . (2.1)
. (2.1) комплексного переменного (изображение) с функцией
комплексного переменного (изображение) с функцией  вещественного переменного (оригинал). С его помощью исследуются свойства динамических систем и решаются дифференциальные и интегральные уравнения.Одной из особенностей преобразования Лапласа, которые предопределили его широкое распространение в научных и инженерных расчётах, является то, что многим соотношениям и операциям над оригиналами соответствуют более простые соотношения над их изображениями. Так, свёртка двух функций сводится в пространстве изображений к операции умножения, а линейные дифференциальные уравнения становятся алгебраическими. Дифференциа́льное уравне́ние — уравнение, связывающее значение некоторой неизвестной функции в некоторой точке и значение её производных различных порядков в той же точке. Дифференциальное уравнение содержит в своей записи неизвестную функцию, ее производные и независимые переменные; однако не любое уравнение, содержащее производные неизвестной функции, является дифференциальным уравнением. Например,
вещественного переменного (оригинал). С его помощью исследуются свойства динамических систем и решаются дифференциальные и интегральные уравнения.Одной из особенностей преобразования Лапласа, которые предопределили его широкое распространение в научных и инженерных расчётах, является то, что многим соотношениям и операциям над оригиналами соответствуют более простые соотношения над их изображениями. Так, свёртка двух функций сводится в пространстве изображений к операции умножения, а линейные дифференциальные уравнения становятся алгебраическими. Дифференциа́льное уравне́ние — уравнение, связывающее значение некоторой неизвестной функции в некоторой точке и значение её производных различных порядков в той же точке. Дифференциальное уравнение содержит в своей записи неизвестную функцию, ее производные и независимые переменные; однако не любое уравнение, содержащее производные неизвестной функции, является дифференциальным уравнением. Например,  не является дифференциальным уравнением. Стоит также отметить, что дифференциальное уравнение может вообще не содержать неизвестную функцию, некоторые её производные и свободные переменные, но обязано содержать хотя бы одну из производных. Порядок, или степень дифференциального уравнения — наибольший порядок производных, входящих в него. Решением (интегралом) дифференциального уравнения порядка n называется функция y(x), имеющая на некотором интервале (a, b) производные y '(x), y ''(x),..., y (n)(x) до порядка n включительно и удовлетворяющая этому уравнению. Процесс решения дифференциального уравнения называется интегрированием. Вопрос об интегрировании дифференциального уравнения считается решенным, если нахождение неизвестной функции удается привести к квадратуре, независимо от того, выражается ли полученный интеграл в конечном виде или нет.Все дифференциальные уравнения можно разделить на обыкновенные (ОДУ), в которые входят только функции (и их производные) от одного аргумента, и уравнения с частными производными (УРЧП), в которых входящие функции зависят от многих переменных. Существуют также стохастические дифференциальные уравнения (СДУ), включающие случайные процессы.Первоначально дифференциальные уравнения возникли из задач механики, в которых участвовали координаты тел, их скорости и ускорения, рассматриваемые как функции времени.где x[nT] - решетчатая функция, которая представляет собой значение непрерывной функции в дискретные моменты времени.При x(t) = 1(t)
не является дифференциальным уравнением. Стоит также отметить, что дифференциальное уравнение может вообще не содержать неизвестную функцию, некоторые её производные и свободные переменные, но обязано содержать хотя бы одну из производных. Порядок, или степень дифференциального уравнения — наибольший порядок производных, входящих в него. Решением (интегралом) дифференциального уравнения порядка n называется функция y(x), имеющая на некотором интервале (a, b) производные y '(x), y ''(x),..., y (n)(x) до порядка n включительно и удовлетворяющая этому уравнению. Процесс решения дифференциального уравнения называется интегрированием. Вопрос об интегрировании дифференциального уравнения считается решенным, если нахождение неизвестной функции удается привести к квадратуре, независимо от того, выражается ли полученный интеграл в конечном виде или нет.Все дифференциальные уравнения можно разделить на обыкновенные (ОДУ), в которые входят только функции (и их производные) от одного аргумента, и уравнения с частными производными (УРЧП), в которых входящие функции зависят от многих переменных. Существуют также стохастические дифференциальные уравнения (СДУ), включающие случайные процессы.Первоначально дифференциальные уравнения возникли из задач механики, в которых участвовали координаты тел, их скорости и ускорения, рассматриваемые как функции времени.где x[nT] - решетчатая функция, которая представляет собой значение непрерывной функции в дискретные моменты времени.При x(t) = 1(t)  . Для любого x(t)
. Для любого x(t)  . (3)Это физически не реализуемо и является математической идеализацией, вводимой для упрощения исследования дискретных систем.Реальный импульсный элемент (рис. 4) - импульсный элемент с конечной длительностью импульса. Он состоит из идеального импульсного элемента и формирователя.Формирователь преобразует идеальные импульсы в импульсы длительности - gT
. (3)Это физически не реализуемо и является математической идеализацией, вводимой для упрощения исследования дискретных систем.Реальный импульсный элемент (рис. 4) - импульсный элемент с конечной длительностью импульса. Он состоит из идеального импульсного элемента и формирователя.Формирователь преобразует идеальные импульсы в импульсы длительности - gT (4)
(4)  характеризует не только устойчивость, но и качество системы (рис. 7).
характеризует не только устойчивость, но и качество системы (рис. 7).