
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Общее устройство экскаватора ЭО-5123
Экскаватор ЭО-5123 (рис. 9.1) относится к универсальным строительным экскаваторам 5-й размерной группы с многомоторным гидравлическим приводом. Он предназначен для разработки грунтов II – IV категорий, а также для погрузки дробленых скальных пород и других навалочных грузов в транспортные средства или отвал.
Экскаватор состоит из трех основных частей: поворотной платформы 1 с механизмами, рабочего оборудования и ходового устройства 2. Рабочее оборудование состоит из стрелы 6, рукояти 9, ковша 10, а также гидроцилиндров 11 стрелы, 7 рукояти и 8 ковша, и шарнирно закрепляется в передней части поворотной платформы. На поворотной платформе, кроме того, размещены силовая установка 4, гидрооборудование, механизм поворота 2, кабина машиниста 5, противовес 3, а также вспомогательное оборудование (баки, радиаторы, трубопроводы). Гидрооборудование экскаватора состоит из гидробака 7 (рис. 9.2), двух аксиально–поршневых насосов 9, реверсивных аксиально-поршневых гидромоторов (один для поворота платформы, два для передвижения экскаватора), гидроцилиндров (по два для поворота стрелы и рукояти и один для поворота ковша), гидрораспределителей (1 и 3 для управления гидромоторами, гидроцилиндрами и 5 регулирующий), центрального коллектора 4, бака 6 фильтров, масляного радиатора 8, трубопроводов и системы гидроуправления, обеспечивающей требуемое функционирование силового гидрооборудования.
Механизмы передвижения экскаватора и поворота платформы, а также насосы силовой установки приводятся через отдельные редукторы с цилиндрическими зубчатыми передачами. Механизм поворота платформы (рис. 9.3, а) приводится от гидромотора 9, который через муфту 8 соединен с ведущим валом 10 трехступенчатого редуктора. Жестко закрепленные на валах 5, 6, 7, 10 шестерни редуктора передают вращение выходному валу 5 и затем обегающей шестерне 2, также жестко закрепленной на консольной части вала 5. При вращении шестерня 2 обегает зубчатый венец 3 опорно-поворотного круга 4, благодаря чему платформа поворачивается относительно ходовой тележки экскаватора.
Направление вращения выходного вала гидромотора 9 зависит от того, в какой канал гидромотора подается под давлением рабочая жидкость. При этом происходит вращение платформы по часовой или против часовой стрелки на неограниченный угол.
Каждая гусеничная лента механизма передвижения приводится от отдельного гидромотора 14 (рис. 9.3, б), соединенного через муфту 15 с ведущим валом трехступенчатого редуктора 13. Через шестерни и валы редуктора вращение передается бортовой передаче, состоящей из двух шестерен 16 и 17, и далее валу 11 на ведущее колесо 12 привода гусеничной ленты. Торможение ходовой тележки во время работы или стоянки осуществляется как гидромоторами механизма передвижения, так и двумя нормально замкнутыми тормозами дискового типа. Для разворота экскаватора включают либо один из гидромоторов механизма передвижения, либо оба гидромотора, но в разные стороны. Привод насосов 21 и 25 (рис. 9.3, в) силовой установки, а также вентилятора 22 масляного радиатора производится от дизеля 19 через соединительную муфту 29 и раздаточный редуктор 18, а также через клиноременную передачу 24 – 23. Элементы рабочего оборудования (стрела, рукоять и ковш) приводятся с помощью гидроцилиндров. Управляют всеми механизмами экскаватора из кабины машиниста.
Система гидропривода В экскаваторе ЭО-5123 применена двухпоточная схема гидропривода (рис. 9.4) от автоматически регулируемых насосов с объединением потоков вручную и групповым питанием гидродвигателей.
Рабочая жидкость из гидробака 10 насосами 15 и 17 силовой установки экскаватора направляется под давлением двумя потоками к золотникам гидрораспределителей 18, 25, 32. При нейтральном положении рукояток блоков 1 и 14 управления напорные линии в гидрораспределителях 18 и 32 перекрыты и рабочая жидкость проходит через открытые золотники регулирующего гидрораспределителя 25 к корпусу фильтров 12, а затем через масляный радиатор 8 в бак 10. Параллельно радиатору установлен предохранительный клапан 11.
При включении (перемещении) золотников гидрораспределителей 18 и 32 золотники регулирующего распределителя 25 одновременно перекрывают прямой слив от насосов 15 и 17 и рабочая жидкость по напорным линиям направляется в гидроцилиндры 27 – 30 или гидромоторы 20 – 22. Из противоположных полостей гидроцилиндров или гидромоторов рабочая жидкость через гидрораспределитель 25 сливается в гидробак 10. На напорных линиях перед гидрораспределителем 22 установлены обратные клапаны 26, предотвращающие опускание рабочего оборудования в начальные моменты включения рукояток 1 и 14 управления. Скорость рабочих движений (перемещение штоков гидроцилиндров, вращение поворотной платформы и передвижение экскаватора) изменяют перемещением золотников регулирующего гидрораспределителя 25 с помощью рукояток блоков управления. Двухпоточная схема обеспечивает включение любых двух движений от разных силовых потоков, а также суммирование силовых потоков при включении одного движения. Гидромоторы механизмов передвижения машины и поворота платформы, а также опускание стрелы и поворот рукояти и ковша на разгрузку грунта работают от одного силового потока. Механизм поворота платформы и гидроцилиндры подъёма стрелы могут включаться от одного и того же потока рабочей жидкости. Для включения двух движений от разных силовых потоков введена определённая последовательность включения и блокировки рабочих механизмов.
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 685; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.234.251 (0.005 с.) |
 Рис. 9.1. Экскаватор ЭО-5123 с оборудованием
обратной лопаты
Рис. 9.1. Экскаватор ЭО-5123 с оборудованием
обратной лопаты
 Рис. 9.2. Поворотная платформа с механизмами
Рис. 9.2. Поворотная платформа с механизмами
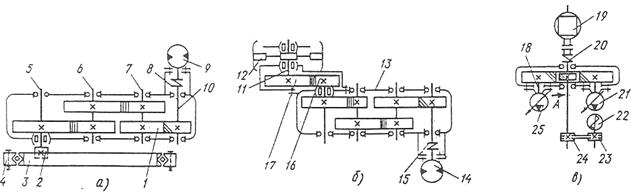 Рис. 9.3. Кинематическая схема привода: а - механизма
поворота платформы; б - механизма передвижения;
в - насосов силовой установки
Рис. 9.3. Кинематическая схема привода: а - механизма
поворота платформы; б - механизма передвижения;
в - насосов силовой установки
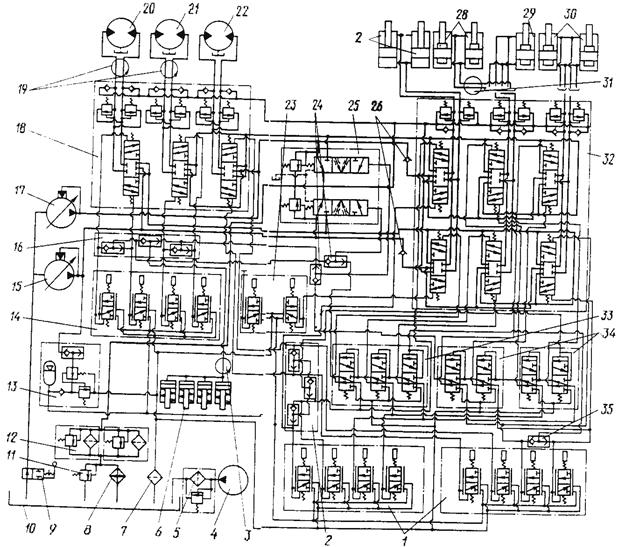 Рис. 9.4. Гидравлическая схема экскаватора ЭО-5123
Рис. 9.4. Гидравлическая схема экскаватора ЭО-5123



