Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Понятие «Автоматизированный электропривод». Структурная схема АЭП.Стр 1 из 8Следующая ⇒
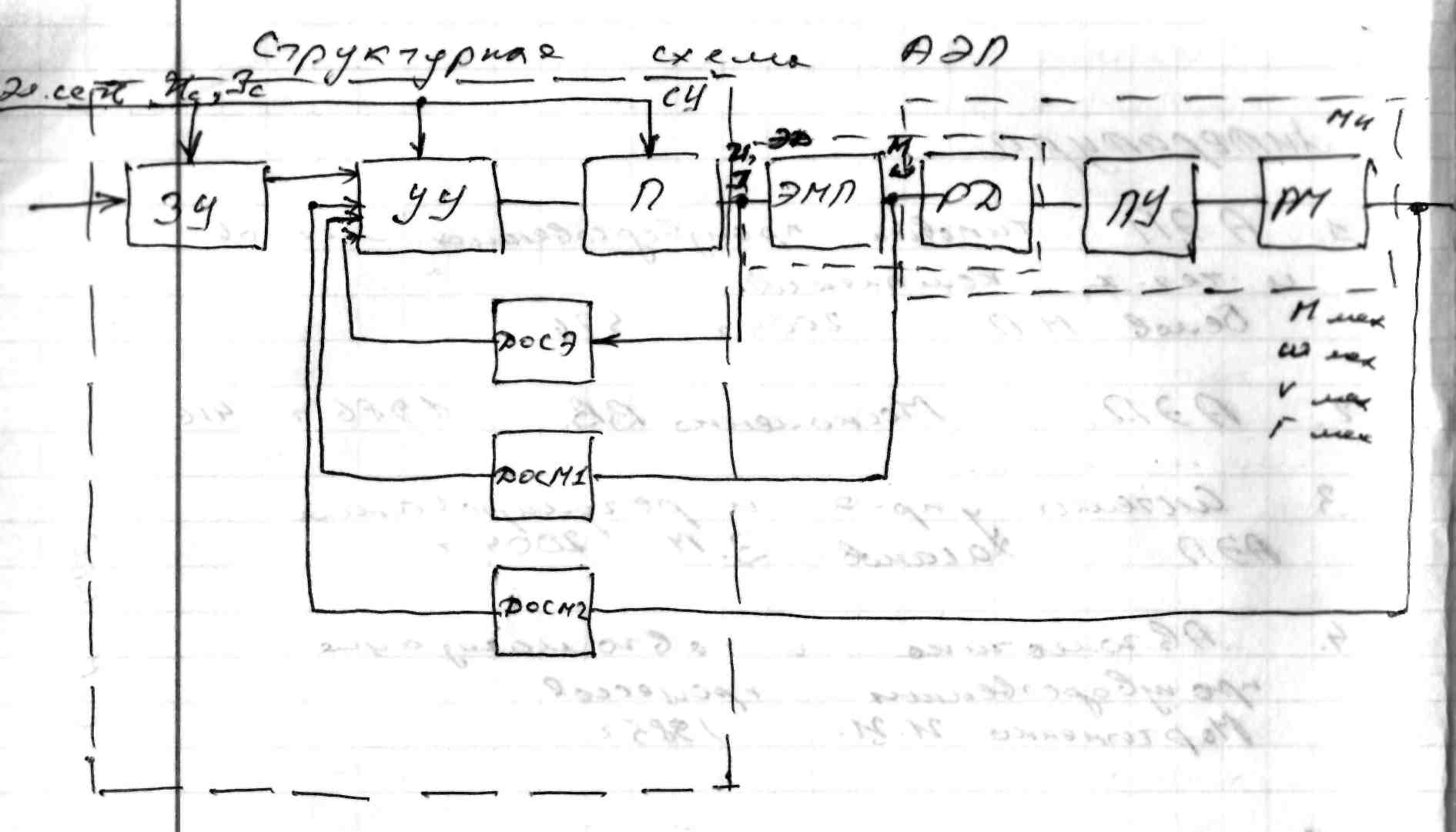
Понятие «Автоматизированный электропривод». Структурная схема АЭП. Автоматизированным ЭП называется электромеханическая система, состоящая из: ЭлДвигательного, Преобразовательного устройства, передаточного уст-ва и управляющего устр-ва, предназначенных для приведения в движение исполнительных органов рабочей машины и целенаправленного управления этими процессами.
ЗУ –задающе устройство, УУ- управляющее устройство, П – преобразователь, ЭМП – эл.мех-й преобразователь (статор), РД – ротор двигателя, ПУ – передаточное устройство, РМ – рабочий механизм, СУ – система управления, ДОСЭ – датчик обратной связи по электрическим параметрам, ДОСМ1 и ДОСМ2 - – датчик обратной связи по механическим характеристикам. Основные части: МЧ –механическая часть привода, ЭД – электродвигательные устройства, СУ – система управления, Управляющее устройство УУ, управляющее преобразователем П, в свою очередь получает командные сигналы от задающего устройства ЗУ. Информацию о техническом состоянии ЭП-да и технологического процесса УУ получает от ДОС. С помощью этих датчиков напряжение, мощность двигателя и другие его параметры, а так же данные с рабочей машине преобразуются в пропорциональные этим параметрам электрические сигналы, которые подаются на УУ. В УУ текущее состояние ЭП и технического процесса сравнивается с заданным, и при наличии рассогласования вырабатывается управляющий сигнал.
Классификация ЭП. Все Эп можно разделить: по функциональному назначению: - главные, - вспомогательные. по способу разделения эл. Энергии: - групповому, - индивидуальному, - взаимосвязанному – в него входит несколько двигателей, например когда рабочий механизм приводится в движение несколькими одинаковыми двигателями (длинный транспортер) - многодвигательному. по роду потребляемого тока: -постоянного тока, - переменного тока. По степени управления ЭП: - нерегулируемые, - регулируемые, - программно управляемые, - следящий – автоматически обрабатывающий перемещение исполнительного механизма с определенной точностью в соответствии с произвольно меняющимся задающим сигналом, - адаптивный – автоматически выбирающий структуру или изменяющий условия работы машины с целью выработки оптимального режима работы.
3. Классификация по уровню автоматизации ЭП. Классификация по уравнению автоматизации: - не автоматизированный ЭП – ручное управление. - автоматизированный ЭП – управление с автоматическим регулированием параметров - автоматический ЭП – управление полностью без участия оператора.
Также можно предоставить классификацию автоматических систем управления (регулирования): По характеру использования информации - Разомкнутые 1. С жесткой программой 2. С управлением по возмущению - Замкнутые По методу управления - Не приспосабливаюшиеся 1. Стабилизирующие 2. Программные 3. Следящие - Приспосабливающиеся По результатам работы в установившемся состоянии - Статические - Астатические По изменению воздействия во времени - Непрерывные - Прерывные (дискретные) 1.Релейные 2.Импульсные 3.Цифровые По числу управляемых величин - Одномерные - Многомерные (многосвязные) По виду дифференциального уравнения - Линейные - Нелинейные
Схема реверсирования АД.
Схема работает следующим образом. При нажатии кнопки SB3 получит питание катушка КМ1 при этом его силовые контакты КМ1.1 замыкаются и двигатель приводится во вращение, одновременно с этим размыкается контакт КМ1.3 (и при нажатии SB3 механически размыкаетсяцепь катушки КМ2). При нажатии SB2 обесточивается цепь катушки КМ1, при этом КМ1.3 возвращается в исходное состояние (замкнутое), КМ2.2 замыкается а КМ2.3 размыкается. Контакт КМ2.1 замыкается и двигатель приходит во вращение в обратном направлении. В схеме предусмотрено два вида защиты от к.з. двигателя при реверсе: 1) Механическая (SB2, SB3-при нажатии одной из кнопок одна цепь замыкается, другая размыкается) 2) Электрическая,(при включении двигателя в одном из направлений, допустим с помощью катушки КМ1, то его вспомогательный контакт КМ1.3 размыкает цепь катушки КМ2).
Система генератор-двигатель (Г-Д).
ТГ – тахогенератор. ЭМУ – электромеханический усилитель. Для осуществления автоматического регулирования прежде всего необходимо измерить регулируемую величину, для этого служит тахогенератор, затем этот результат измерения Uвых сравнивается с заданной величиной Uзад, и разница передается для воздействия на регулирующий орган, обычно эта разница оказывается недостаточной для воздействия на регулирующий орган и поэтому в схему необходимо введение усилительных и преобразовательных органов.
Измерительный орган, усилитель, регулирующий орган входят в устройство регулятора, осуществляющего процесс регулирования. Система автоматического регулирования характерна наличием обратных связей, кроме того могут быть внутренние обратные связи. Внутренняя ОС соединяет вход и выход только отдельных элементов. Автоматическое регулирование в схеме достигается следующим образом: предположим что нагрузка на валу двигателя увеличивается, тогда скорость его и напряжение тахогенератора уменьшается, а напряжение на входе усилителя расчет, что приводит к повышению напряжения на якоре двигателя. А следовательно к поддержанию его скорости. Чем больше коэффициент усиления усилителя, тем точнее поддерживается скорость на заданном уровне.
Основные понятия частотного управления. Принципиальная возможность регулирования угловой скорости АД изменением частоты питающего напряжения вытекает из уравнения; ω=(2F(1-S))/Р Желательно чтобы при частотном управлении АД соблюдался следующее закон управления: U/f=const При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения U=kФf1 Если при неизменном напряжении изменять частоту то поток будет изменяться обратно пропорционально частоте. При уменьшении частоты магнитный поток возрастает что приводит к насыщению стали машины, и как следствие к резкому увеличению тока и повышению температуры двигателя. При увеличении частоты поток уменьшается и как следствие уменьшается допустимый момент. Для наилучшего использование АД при регулировании угловой скорости, частоту необходимо регулировать одновременно с функцией напряжения и момента, что реализуемо только в замкнутых системах электропривода.
15. Экономическая оценка энерго- и ресурсосбережения. Экономическая эффекимвность энергосберегающих мероприятий, как и др. инвест-х проектов производится путем сопоставления стоимостных оценок получ. результатов и приведенных затрат на их реализацию. ЭЭ=Р – З Р/З›1 ЭЭ›0 Особенности большинства проектов энергоресурсосбережения ЭП явл. Набольшие сроки реализации. Поэтому для определения их эконом. Эффект использ. Метод связанный с расчетом срока окупаимости проекта. Срок оккупаимости представляет собой период времени, в течение которогокапиталовложение окупаится за счет снижения эксплуатационных затрат
В эксплуатационные затраты в общем случае входят: амортизационные отчисления, затраты на обслуживание и ремонт, стоимость эл. энергии, ЗП, капитальные затраты вкл. Стоимость оборуд., затраты на его транспортирование, монтажно-наладочные работы, проектные работы.
Основные понятия управления вентиляторным, насосным и компрессорным оборудованием. Все регулирующие устройства в зависимости от их влияния на хар-ку сети или нагнетателя можно разделить на три группы:
В 1гр. Входят устройства дросселирующую сеть т.е. изменяющие характеристику сети, но не изменяющие характеристику нагнетателя к таким устройством относятся (клапаны, задвижки и т.д.) При дросселировании параметры рабочей точки т.е. подача давления мощности КПД определяют на хар. нагнетателя при изменяемой частоте вращения рабочего колеса. 2гр. Образуют устройства изменяющую частоту вращения рабочего колеса (нагнетателя) при этом хар. сети не меняется. Известно много устройств позволяющие изменять постоянное вращение рабочего колеса (эл.двигатели, различные муфты) 3гр. Включают в себя устройство одновременно изменяющие характеристики нагнетателя и сети. Примером такого устройства является входной направляющий аппарат устанавливаемый в вентеляциооном агрегате. Изменение подачи или давления нагнетателя при регулировании, отнесенное к подаче и давлению при исходном режиме хар-ет глубину регулирования.
Понятие «Автоматизированный электропривод». Структурная схема АЭП. Автоматизированным ЭП называется электромеханическая система, состоящая из: ЭлДвигательного, Преобразовательного устройства, передаточного уст-ва и управляющего устр-ва, предназначенных для приведения в движение исполнительных органов рабочей машины и целенаправленного управления этими процессами.
ЗУ –задающе устройство, УУ- управляющее устройство, П – преобразователь, ЭМП – эл.мех-й преобразователь (статор), РД – ротор двигателя, ПУ – передаточное устройство, РМ – рабочий механизм, СУ – система управления, ДОСЭ – датчик обратной связи по электрическим параметрам, ДОСМ1 и ДОСМ2 - – датчик обратной связи по механическим характеристикам. Основные части: МЧ –механическая часть привода, ЭД – электродвигательные устройства, СУ – система управления, Управляющее устройство УУ, управляющее преобразователем П, в свою очередь получает командные сигналы от задающего устройства ЗУ. Информацию о техническом состоянии ЭП-да и технологического процесса УУ получает от ДОС. С помощью этих датчиков напряжение, мощность двигателя и другие его параметры, а так же данные с рабочей машине преобразуются в пропорциональные этим параметрам электрические сигналы, которые подаются на УУ. В УУ текущее состояние ЭП и технического процесса сравнивается с заданным, и при наличии рассогласования вырабатывается управляющий сигнал.
Классификация ЭП. Все Эп можно разделить: по функциональному назначению: - главные, - вспомогательные. по способу разделения эл. Энергии: - групповому, - индивидуальному, - взаимосвязанному – в него входит несколько двигателей, например когда рабочий механизм приводится в движение несколькими одинаковыми двигателями (длинный транспортер) - многодвигательному. по роду потребляемого тока: -постоянного тока, - переменного тока. По степени управления ЭП: - нерегулируемые, - регулируемые, - программно управляемые, - следящий – автоматически обрабатывающий перемещение исполнительного механизма с определенной точностью в соответствии с произвольно меняющимся задающим сигналом, - адаптивный – автоматически выбирающий структуру или изменяющий условия работы машины с целью выработки оптимального режима работы.
3. Классификация по уровню автоматизации ЭП. Классификация по уравнению автоматизации: - не автоматизированный ЭП – ручное управление. - автоматизированный ЭП – управление с автоматическим регулированием параметров - автоматический ЭП – управление полностью без участия оператора.
Также можно предоставить классификацию автоматических систем управления (регулирования): По характеру использования информации - Разомкнутые 1. С жесткой программой 2. С управлением по возмущению - Замкнутые По методу управления - Не приспосабливаюшиеся 1. Стабилизирующие 2. Программные 3. Следящие - Приспосабливающиеся По результатам работы в установившемся состоянии - Статические - Астатические По изменению воздействия во времени - Непрерывные - Прерывные (дискретные) 1.Релейные 2.Импульсные 3.Цифровые По числу управляемых величин - Одномерные - Многомерные (многосвязные) По виду дифференциального уравнения - Линейные - Нелинейные
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 484; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.119.199 (0.035 с.) |