
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Задача фильтрации по выработке корректур с использованием ФК
Измерения · Скоростные измерения по GPS:
где
(здесь Соотношения (4.1) могут быть приведены к виду:
где
Позиционные измерения
· Курсовое измерение
· Скоростные измерения по лагу:
где
Расчетная модель При формировании расчетной модели погрешностей ИНС использовались следующие аппроксимации: · смещения нулей гироскопов · погрешности знания румбовых дрейфов
где
В этом случае расчетная модель погрешностей ИНС будет иметь вид
где
- вектор состояния системы;
- переходная на шаге
здесь
Константы dT=0.005 c; % рабочая частота (в ней вычисляется только переходная матрица Fk на интервале Tz) Tz=1 c; % дискретность измерений, (вычисления ФК осуществляются в фоне с приходом измерений, но не более интервала Tz) RAxo; RBxo; RAyo; RByo; -% априорные значения коэффициентов румбовых дрейфов, полученные в режиме калибровки ИНС с использованием курсовых измерений; % Po SigmaAlphao=0.3*pi/180; SigmaBetao=0.01*pi/180; SigmaGammao=0.01*pi/180; SigmaDVEo=0.1; SigmaDVNo=0.1; SigmaDVHo=0.1; SigmaDFio=10/R; SigmaDLamo=10/R*cos(fio*pi/180); SigmaDho=1; SigmaCDXbo=0.01*5e-6; SigmaCDYbo=0.01*5e-6; SigmaCDZbo=0.01*5e-6; SigmaCAksXbo=0.001; SigmaCAksYbo=0.001; SigmaCAksZbo=0.001; SigmaCMgXbo=1e-5; SigmaCMgYbo=1e-5; SigmaCMgZbo=1e-5; SigmaRxAo=0.003*5e-6; SigmaRxBo=0.003*5e-6; SigmaRyAo=0.003*5e-6; SigmaRyBo=0.003*5e-6; SigmaVTEogps=1e-25*0.1; SigmaVTNogps=1e-25*0.1; po24gps=[SigmaAlphao^2;SigmaBetao^2;SigmaGammao^2; SigmaDVEo^2;SigmaDVNo^2;SigmaDVHo^2; SigmaDFio^2;SigmaDLamo^2;SigmaDho^2; SigmaCDXbo^2;SigmaCDYbo^2;SigmaCDZbo^2; SigmaCAksXbo^2;SigmaCAksYbo^2;SigmaCAksZbo^2; SigmaCMgXbo^2;SigmaCMgYbo^2;SigmaCMgZbo^2; SigmaRxAo^2;SigmaRxBo^2;SigmaRyAo^2;SigmaRyBo^2; SigmaVTEogps^2;SigmaVTNogps^2]; Po24gps=diag(po24gps); % Q SigmaDrE=0.1*5e-6; SigmaDrN=0.1*5e-6; SigmaDrH=0.1*5e-6; SigmaAksE=0.03; SigmaAksN=0.03; SigmaAksH=0.03; SigmaDrFi=5/R; SigmaDrLam=5/R*cos(fio*pi/180); SigmaDrh=0.1; SigmadCDrXb=1e-2*0.01*5e-6; SigmadCDrYb=1e-2*0.01*5e-6; SigmadCDrZb=1e-2*0.01*5e-6; SigmadCAksXb=1e-2*0.001; SigmadCAksYb=1e-2*0.001; SigmadCAksZb=1e-2*0.001; SigmadCMgXb=1e-2*1e-5; SigmadCMgYb=1e-2*1e-5; SigmadCMgZb=1e-2*1e-5; SigmadRxA=1e-2*0.003*5e-6; SigmadRxB=1e-2*0.003*5e-6; SigmadRyA=1e-2*0.003*5e-6; SigmadRyB=1e-2*0.003*5e-6; SigmaVTEgps=0; SigmaVTNgps=0; SigmaVTEr=0.2; SigmaVTNr=0.2; MUVTEr=1/5400; MUVTNr=1/5400; q24gps=[SigmaDrH^2;SigmaDrE^2;SigmaDrN^2; SigmaAksE^2;SigmaAksN^2;SigmaAksH^2; SigmaDrFi^2;SigmaDrLam^2;SigmaDrh^2; SigmadCDrXb^2;SigmadCDrYb^2;SigmadCDrZb^2; SigmadCAksXb^2;SigmadCAksYb^2;SigmadCAksZb^2; SigmadCMgXb^2;SigmadCMgYb^2;SigmadCMgZb^2; SigmadRxA^2;SigmadRxB^2;SigmadRyA^2;SigmadRyB^2; 2*MUVTEr*SigmaVTEgps^2/Tq;2*MUVTNr*SigmaVTNgps^2/Tq]; Q24gps=diag(q24gps); q24gpsL=[SigmaDrH^2;SigmaDrE^2;SigmaDrN^2; SigmaAksE^2;SigmaAksN^2;SigmaAksH^2; SigmaDrFi^2;SigmaDrLam^2;SigmaDrh^2; SigmadCDrXb^2;SigmadCDrYb^2;SigmadCDrZb^2; SigmadCAksXb^2;SigmadCAksYb^2;SigmadCAksZb^2;
SigmadCMgXb^2;SigmadCMgYb^2;SigmadCMgZb^2; SigmadRxA^2;SigmadRxB^2;SigmadRyA^2;SigmadRyB^2; 2*MUVTEr*SigmaVTEr^2/Tq;2*MUVTNr*SigmaVTNr^2/Tq]; Q24gpsL=diag(q24gpsL); Формирование измерений Режим калибровки (на стенде) – z1, H1,R1 · вектор измерений
· матрица измерений
H1 =[0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0]; %матрица ковариаций шумов измерений SigmaDVEGPS=0.3; SigmaDVNGPS=0.3; SigmaDFiGPS=30/R; SigmaDLamGPS=30/(R*cos(fi)); SigmaDh=1; SigmaDKs=180*5e-6; SigmaDVEL=0.3; SigmaDVNL=0.3; r1=[SigmaDVEGPS^2;SigmaDVNGPS^2; SigmaDFiGPS^2;SigmaDLamGPS^2;SigmaDh^2; SigmaDKs^2;SigmaDVEL^2;SigmaDVNL^2]; R1=diag(r1); Обсервационный режим (GPS) – z2,H2,R1 · вектор измерений
· матрица измерений
H2 =[0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0]; Обсервационный режим (GPS+лаг) – z3,H3,R1 · вектор измерений
· матрица измерений
H3 =[0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; -VN 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0; VE 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 - 1 ]; Автономный режим (лаг) – z4,H4,R1 · вектор измерений
· матрица измерений
H4 =[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; -VN 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 0; VE 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 ]; Ковариационный канал ФК
Оценочный канал ФК
- для составляющих вектора состояния (погрешности выработки параметров ориентации, линейной скорости и координат места), оценки которых на каждом шаге подаются в обратной связи на входы соответствующих интеграторов;
- для составляющих вектора состояния (дрейфы и погрешности масштабных коэффициентов гироскопов, инструментальные погрешности акселерометров и т.п.), оценки которых на каждом шаге подаются в обратной связи в выходные сигналы соответствующих измерителей; X(1:24); X1=X(1:9,1); X2=X(10:24,1);
Xpr=Fkp(k+1/k)*X(k); x1pr=[0;0;0;0;0;0;0;0;0]; Xpr=[x1pr;X2pr]; X(k+1)=Xpr+KF1*z1(k+1); ( фиксируется запаздывание dtj времени окончания вычисления оценок с момента прихода измерений и соответствующая этому запаздыванию матрица Fkp(dtj)) X=Fkp(dtj)*X; Выходные данные фильтровой задачи - управления, вырабатываемые в ФК, подаются со знаком «-» в обратную связь:
FKOr=[
Литература
1. Бромберг П.В. Теория инерциальных систем навигации.- М.: Наука, 1979. 2. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. -М.: Наука, 1976. 3. Каракашев В.А. Автономные инерциальные навигационные системы. Учебное пособие, Л.: ЛИТМО, 1983. - 89с. 4. Лукьянов Д.П., Мочалов А.В., Одинцов А.А., Вайсгант И.Б. Инерциальные навигационные системы морских объектов.- Л.: Судостроение, 1989. 5. Лесючевский В.М., Литманович Ю.А. Новые подходы к разработке дискретных алгоритмов выработки параметров поступательного движения объекта в инерциальных навигационных системах//Гироскопия и навигация. - 1994, - № 2. -С. 39-58.
Приложения 1. Корабельная ИНС на ПИГ "ЛАДОГА-МЭ" (разработка ЦНИИ «Электроприбор»)
Рис.П1. Центральный прибор (гиростабилизатор) ИНС «ЛАДОГА-МЭ» (со снятой крышкой корпуса)
ИНС «ЛАДОГА-МЭ» предназначена для выработки параметров ориентации и навигационных параметров и может работать как в автономном так и в корректируемом (от GPS и ГЛОНАСС) режимах. Условия эксплуатации: · бортовая качка с амплитудой до 150 и угл. скоростью до 15 о/с · килевая качка с амплитудой до 70 и угл. скоростью до 8 o/с · охлаждение естественное
Технические характеристики погрешности выработки параметров ориентации: · углов качки 1,5 угл.мин · угловых скоростей качки 0,2 о/с · составляющих скорости, вызываемых качкой и орбитальным движением 0,1 м/c · перемещений, вызываемых качкой и орбитальным движением 0,1 м погрешности выработки навигационных параметров: · в корректируемом режиме: координат места 0,1-0,4 км курса 3 угл.мин ( составляющих скорости 0,2-0,8 уз · в автономном режиме: координат места 5 км за 24 ч курса 6 угл.мин ( составляющих скорости 1,2 уз Эксплуатационные характеристики: потребляемая мощность от сети 27 В: · пусковая 1000 Вт · рабочая 600 Вт Время готовности при включении у пирса 6 ч при запуске в море 8 ч выходной интерфейс ГОСТ 26765.52-87
2. Дискретные алгоритмы ИНС:
|
|||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 192; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.248.208 (0.119 с.) |
 (5.4.1)
(5.4.1) - приращения декартовых координат МПО в проекциях на географические оси, вырабатываемые по данным
- приращения декартовых координат МПО в проекциях на географические оси, вырабатываемые по данным  ИНС о составляющих вектора линейной скорости на интервале
ИНС о составляющих вектора линейной скорости на интервале  измерений приращений
измерений приращений  декартовых координат в доплеровском канале ПА СНС, пересчитанных от точки размещения приемной антенны
декартовых координат в доплеровском канале ПА СНС, пересчитанных от точки размещения приемной антенны  СНС к месту установки ИМ ИНС
СНС к месту установки ИМ ИНС ,
, - приращение матрицы ориентации МПО за время
- приращение матрицы ориентации МПО за время  ,
,  - отстояние приемной антенны СНС от ИМ ИНС);
- отстояние приемной антенны СНС от ИМ ИНС); (5.4.2)
(5.4.2) - погрешности доплеровского канала ПА GPS/ГЛОНАСС - дискретные белые шумы с дисперсиями
- погрешности доплеровского канала ПА GPS/ГЛОНАСС - дискретные белые шумы с дисперсиями  на частоте 1Гц,
на частоте 1Гц,  ;
; - реальные шумы скоростных измерений.
- реальные шумы скоростных измерений. (5.4.3)
(5.4.3) , (5.4.4)
, (5.4.4) (5.4.5)
(5.4.5) - восточная и северная составляющие морских течений, которые являются основными погрешностями относительного лага - марковские процессы первого порядка с интервалом корреляции порядка 5400с и
- восточная и северная составляющие морских течений, которые являются основными погрешностями относительного лага - марковские процессы первого порядка с интервалом корреляции порядка 5400с и  ;
; - шумы измерений, включающие неизмеряемую лагом поперечную составляющую вектора скорости корабля и инструментальные погрешности лага и аппроксимированные белыми шумами с дисперсией
- шумы измерений, включающие неизмеряемую лагом поперечную составляющую вектора скорости корабля и инструментальные погрешности лага и аппроксимированные белыми шумами с дисперсией  на частоте 1 гц.
на частоте 1 гц. и акселерометров
и акселерометров  , изменения систематических составляющих погрешностей масштабных коэффициентов
, изменения систематических составляющих погрешностей масштабных коэффициентов  гироскопов от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами;
гироскопов от запуска к запуску и их изменчивость в пуске - были аппроксимированы (из-за отсутствия достоверных данных об их спектральном составе) соответствующими винеровскими процессами; были представлены в виде первой гармоники от угла поворота ИМ (ГСП)
были представлены в виде первой гармоники от угла поворота ИМ (ГСП) ; (5.4.6)
; (5.4.6) - искомые коэффициенты разложения, аппроксимированные соответствующими винеровскими процессами.
- искомые коэффициенты разложения, аппроксимированные соответствующими винеровскими процессами. (5.4.7)
(5.4.7) (5.4.8)
(5.4.8) (5.4.9)
(5.4.9) матрица системы (5.4.7) для момента времени
матрица системы (5.4.7) для момента времени  , здесь
, здесь  - единичная матрица размерности
- единичная матрица размерности  ;
; - матрица динамики системы, ненулевые элементы которой определяются соотношениями:
- матрица динамики системы, ненулевые элементы которой определяются соотношениями: ,
, ;
; 






 ;
;  ;
; 



 ;
;  ;
;
 ;
;

 ;
;
 (5.4.10)
(5.4.10) ;
;  ;
; и
и  - текущие значения составляющих вектора угловой скорости вращения трехгранника
- текущие значения составляющих вектора угловой скорости вращения трехгранника  и вектора кажущегося ускорения в месте установки ИМ ИНС, вычисляемые по данным ИНС;
и вектора кажущегося ускорения в месте установки ИМ ИНС, вычисляемые по данным ИНС;  - значения соответственно угловой скорости вращения Земли, широты места и восточной составляющей линейной скорости объекта относительно Земли;
- значения соответственно угловой скорости вращения Земли, широты места и восточной составляющей линейной скорости объекта относительно Земли;  - элементы матрицы
- элементы матрицы  направляющих косинусов, определяющих взаимную ориентацию связанного с ИМ (ГСП) трехгранника
направляющих косинусов, определяющих взаимную ориентацию связанного с ИМ (ГСП) трехгранника  (b) и горизонтного географического трехгранника ENH (h);
(b) и горизонтного географического трехгранника ENH (h); - матрица, определяющая влияние вектора входных шумов
- матрица, определяющая влияние вектора входных шумов  с ковариациями
с ковариациями  .
. .
. :
: ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;
 ;
;  .
. .
.
 ;
; .
.

 ;
;  ;
;
 ;
;  .
. .
.
 ;
;  ;
;  ;
;  ;
; 


 =X(1,1);
=X(1,1); =X(2,1);
=X(2,1); =X(3,1);
=X(3,1); (Omh_) в задаче ориентации (с обнулением управлений через интервал времени Tz);
(Omh_) в задаче ориентации (с обнулением управлений через интервал времени Tz); =X(4,1);
=X(4,1); =X(5,1);
=X(5,1); =X(6,1);
=X(6,1); =X(7,1);
=X(7,1); =X(8,1);
=X(8,1); =X(9,1); -со знаком «-» и весом dT/Tz (с обнулением управлений через интервал времени Tz) на входы соответствующих интеграторов алгоритма задачи преобразования сигналов акселерометров на навигационные оси и интегрирования;
=X(9,1); -со знаком «-» и весом dT/Tz (с обнулением управлений через интервал времени Tz) на входы соответствующих интеграторов алгоритма задачи преобразования сигналов акселерометров на навигационные оси и интегрирования; =(X(10,1)+(RAxo+X(19,1))*cos(q)+(RBxo+X(20,1))*sin(q));
=(X(10,1)+(RAxo+X(19,1))*cos(q)+(RBxo+X(20,1))*sin(q)); =(X(11,1)+(RAyo+X(21,1))*cos(q)+(RByo+X(22,1))*sin(q));
=(X(11,1)+(RAyo+X(21,1))*cos(q)+(RByo+X(22,1))*sin(q)); =X(12,1);
=X(12,1); =X(13,1);
=X(13,1);  =X(14,1);
=X(14,1);  =X(15,1);
=X(15,1); =X(16,1);
=X(16,1);  =X(17,1);
=X(17,1);  =X(18,1);
=X(18,1); =X(23,1);
=X(23,1);  =X(24,1); % -в выходные сигналы соответственно гироскопов, акселерометров и лага со знаком «-».
=X(24,1); % -в выходные сигналы соответственно гироскопов, акселерометров и лага со знаком «-».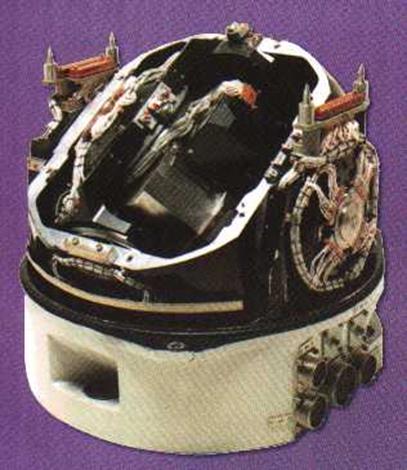




 ); 1,5 угл.мин/
); 1,5 угл.мин/ 



