Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Учет нелинейности выходной характеристики ВОГ ⇐ ПредыдущаяСтр 7 из 7
Известно, что выходное напряжение ВГ951(910) представляет собой функцию угловой скорости
где
Откуда, используя разложение в ряд и ограничивая число членов разложения, можно получить приближенно, что
или для дрейфа ВОГ:
где Изменения Положим, что В этом случае расчетная модель погрешностей ИСОН будет иметь вид
где
Результаты моделирования. Условия движения объекта: · курс – 250; постоянная скорость движения - 5 м/с; · гармоническое рыскание с амплитудой · гармоническая килевая качка с амплитудой · гармоническая бортовая качка с амплитудой Начальные значения погрешностей: · · · флюктуационные составляющие дрейфов ВОГ в проекциях на оси ИБ -белый шум интенсивности
· · ·
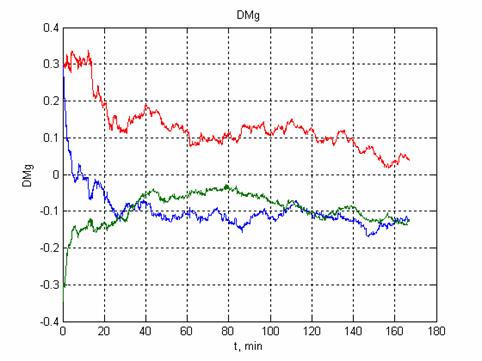
Рис. 13.5a. Погрешности калибровки масштабных коэффициентов ВОГ
Рис. 13.5b. Погрешности калибровки коэффициентов нелинейности ВОГ
Анализ приведенных результатов позволяет сделать следующие выводы. 1. Использование данных относительного лага в автономном режиме работы корабельной ИСОН на базе БИИМ на ВОГ низкой точности типа VG 951 с модуляционными реверсными поворотами измерительного блока может обеспечить удержание погрешностей системы по курсу в пределах 1,00 в широтах до 600. При этом имеет место устойчивый характер погрешностей в выработке параметров ориентации объекта. 2. Определяющим моментом для достижения требуемого уровня погрешностей выработки курса является точность калибровки (не хуже 0,10/ч) “румбовых” дрейфов измерительного блока БИИМ при работе ИСОН в обсервационном режиме, который может обеспечиваться применением либо мультиантенной ПА GPS/ГЛОНАСС типа МРК-11 (при решении, в частности, проблемы привязки и контроля отсчетных баз по курсу между МРК-11 и БИИМ) либо стандартной ПА GPS/ГЛОНАСС в динамических условиях движения корабля. 3. Калибровка дрейфов ВОГ обеспечивается в системе при использовании модуляционных реверсных поворотов измерительного блока БИИМ как по данным ПА GPS/ГЛОНАСС, так и относительного лага. Принципиальным является калибровка масштабных коэффициентов ВОГ в процессе эксплуатации (вследствие их существенной изменчивости). В противном случае будет иметь место возмущаемость погрешности БИИМ по курсу в условиях маневрирования объекта. Требуемая точность калибровки масштабных коэффициентов ВОГ обеспечивается в условиях качки и рыскания объекта. 4. При построении ИСОН на базе БИИМ на ММГ и мультиантенной ПА GPS/ГЛОНАСС типа МРК-11 в динамических условиях движения корабля обеспечивается контроль систематической погрешности (погрешности привязки отсчетной базы) ПА GPS/ГЛОНАСС по курсу.
|
||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 170; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.16.124 (0.015 с.) |
 и окружающей температуры
и окружающей температуры  . В пределах диапазона
. В пределах диапазона  входных скоростей выходное напряжение ВГ951 можно аппроксимировать следующим выражением:
входных скоростей выходное напряжение ВГ951 можно аппроксимировать следующим выражением: , (13.5.1)
, (13.5.1) - масштабный коэффициент;
- масштабный коэффициент;  - нулевой сигнал;
- нулевой сигнал;  - температурные изменения
- температурные изменения  - параметр нелинейности;
- параметр нелинейности;  - выходной шум.
- выходной шум. , (13.5.2)
, (13.5.2) , (13.5.3)
, (13.5.3) - нестабильность нуля от пуска к пуску,
- нестабильность нуля от пуска к пуску,  - относительная нестабильность масштабного коэффициента,
- относительная нестабильность масштабного коэффициента,  - относительная нестабильность коэффициента нелинейности,
- относительная нестабильность коэффициента нелинейности,  - флуктуационная составляющая дрейфа.
- флуктуационная составляющая дрейфа. =30 0/c,
=30 0/c,  =0.1; тогда
=0.1; тогда  с2.
с2. ,
, (13.5.4)
(13.5.4) 1.50и периодом
1.50и периодом  15 с;
15 с; 50и периодом
50и периодом  12 с;
12 с; 150 ипериодом
150 ипериодом  10 с;
10 с; - смещение нулей ВОГ в проекциях на оси
- смещение нулей ВОГ в проекциях на оси  ИБ - случайные величины с начальным уровнем 1 0/ч;
ИБ - случайные величины с начальным уровнем 1 0/ч; - случайные составляющие дрейфов ВОГ, которые характеризуют дрейф нуля в пуске - марковские процессы первого порядка с интервалом корреляции порядка 600 с и
- случайные составляющие дрейфов ВОГ, которые характеризуют дрейф нуля в пуске - марковские процессы первого порядка с интервалом корреляции порядка 600 с и  ;
;
 - смещение масштабных коэффициентов ВОГ - случайные величины с начальным уровнем 0.3%;
- смещение масштабных коэффициентов ВОГ - случайные величины с начальным уровнем 0.3%; - нестабильность масштабных коэффициентов ВОГ - марковские процессы первого порядка с интервалом корреляции порядка 3600 с и
- нестабильность масштабных коэффициентов ВОГ - марковские процессы первого порядка с интервалом корреляции порядка 3600 с и  ;
; - смещение коэффициентов нелинейности ВОГ - случайные величины с начальным уровнем 0.3 с2 при
- смещение коэффициентов нелинейности ВОГ - случайные величины с начальным уровнем 0.3 с2 при