Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Простейшие системы управления. ⇐ ПредыдущаяСтр 4 из 4
На рис. 23.23 а показана система управления самолета Ил-28 с максимальной скоростью полета V max до 900 км/ч, дальностью полета L max = 2500 км и массой порядка 20 т. Несмотря на сравнительно высокое значение V max система управления этого самолета представляла собой смешанную проводку управления. В этой системе рычаги управления были связаны с рулями и элеронами без использования гидравлических или электромеханических приводов – усилителей мощности управляющих сигналов от летчика или автоматических устройств (автопилота). Источником энергии для отклонения органов управления в этой системе оставались мускульная сила летчика или усилия рулевых машин автопилота.
Рис. 23.24. Система управления дозвукового самолета
Управление РВ осуществлялось от штурвальной колонки 1 с помощью тросовой проводки, проложенной на роликах 7 по обоим бортам фюзеляжа (для повышения живучести системы управления) до качалок 8 и тяг 9 к РВ. В хвостовой части фюзеляжа слева на борту была расположена рулевая машина (РМ) 4 автопилота (АП), соединенная тросами 10 с проводкой управления РВ. Управление элеронами осуществлялось от штурвалас помощью смешанной проводки управления: тросами на роликах от штурвальной колонки до заднего лонжерона центроплана и тягами в роликовых направляющих вдоль крыла до элеронов. Передача движения от тросов на тяги обеспечивалась креплением тросов к центральной тяге 5 с помощью хомута 6. Здесь же с помощью тросов к тяге 5 подключалась и РМ 4 управления элеронами от АП. Управление РН осуществлялось от педалей 3, которые через вал 2 под полом кабины летчика соединялись тросами в направляющих роликах по правому борту фюзеляжа с качалкой и тягой к РН в хвостовой части фюзеляжа. Здесь же к проводке управления подсоединялась и РМ 4 АП. Триммеры РН и элеронов отклонялись с помощью электромеханизмов с электродистанционным управлением. Триммеры РВ 15 (рис. 8.15, б) управлялись из кабины штурвальчиком 12, связанным тросовой проводкой с центральным механизмом 13 на заднем лонжероне стабилизатора, и далее валами 14 с винтовыми механизмами 11 триммеров РВ 15. Автопилот обеспечивал стабилизацию самолета на задаваемых летчиком (штурманом) режимах полета. Развитие систем управления. Пример системы управления самолетом с высокой дозвуковой скоростью полета
Развитие магистральных пассажирских и транспортных самолетов сопровождалось при V max = 900 км/ч увеличением их полезной нагрузки и взлетной массы, что приводило к значительному увеличению шарнирных моментов на органах управления М ш. Значение М ш = y pа (для элеронов М ш = y эла) нельзя уже было существенно уменьшить за счет увеличения плеча до руля выносом ГО на верхнюю часть стреловидного киля (при этом уменьшалась потребная величина Y p ), увеличения осевой компенсации (уменьшалось значение а ) и уменьшения площади руля (уменьшалось значение y р), как это было сделано на самолетах Ту-134, Ил-62. Управлять вручную только за счет мускульной силы с увеличением М ш становилось все труднее и, наконец, стало практически невозможным. Это привело к тому, что в системах управления самолетом стали появляться гидравлические усилители мощности управляющих сигналов – гидроусилители (ГУ). Внедрению ГУ в систему управления способствовала также необходимость улучшения характеристик устойчивости и управляемости самолета. Автоматизация системы управления в этих целях также потребовала использования гидравлических (ГУ) или электромеханических усилителей мощности. на рис. 23.25 представлена система управления самолетом с высокой дозвуковой скоростью полета на примере системы управления самолетом Ту-134.
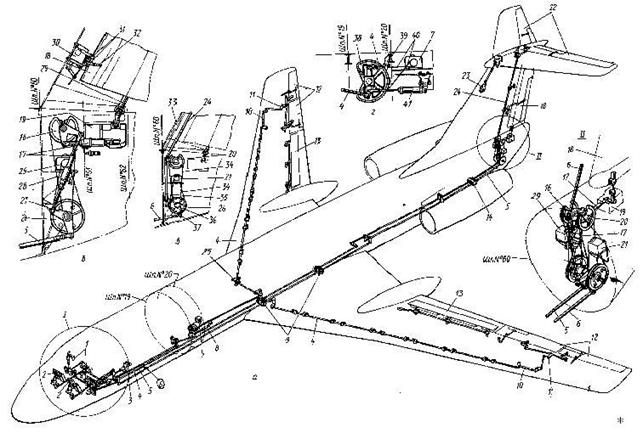
Рис. 23.25. система управления самолетом с высокой дозвуковой скоростью полета Продольное, путевое и поперечное управление самолетом осуществляется РВ 22, РН 18, элеронами 12 и интерцепторами 13 (рис. 23.25 а). РВ и элероны приводятся в действие вручную посредством штурвальных колонок 1 и их штурвалов. Конструкция отдельной штурвальной колонки приведена на рис. 23.6 а, а всего командного сдвоенного (для двух летчиков) поста управления на рис. 23.6 е в носовой части самолета (см. узел 1 рис. 23.25 а). РН управляют с помощью однокамерного гидроусилителя (ГУ) 19 (рис. 23.25 б и узел ii), включенного по необратимой схеме и работающего от основной или при ее отказе – от автономной гидросистемы. Предусмотрена возможность перехода на безбустерное (с отключением ГУ) ножное управление РН. Конструкция отдельного поста ножного управления показана на рис. 23.7 б.
Управление РВ и элеронами безбустерное. В системе управления элеронами для улучшения характеристик управления по крену включен пружинный загрузочный механизм (ЗМ) 8, увеличивающий нагрузку на штурвале при его повороте. Нагрузка на педалях 2 при включении гидроусилителя создается взлетно-посадочным загрузочным механизмом 3. Для ограничения углов отклонения РН на больших скоростях полета введен полетный ЗМ, связанный с тягами от педалей ножного управления. Включение ЗМ происходит автоматически при включении ГУ и уборке закрылков. Для уменьшения нагрузок от полетного ЗМ используют механизм триммерного эффекта (МТЭ), включением которого изменяют длину пружин в ЗМ и тем самым – нагрузку на РУ. На самолете применен автопилот (АП). При рассогласовании электрических мостиковых схем датчиков АП (гироскоп с тремя степенями свободы) и рулевых машин (РМ), последние с помощью своих электромоторов создают крутящий момент на выходном валу РМ. Рулевые машины: элеронов 7, РВ 21 и РН 29 – при помощи тросов 40, 34 и 28 и секторов 38, 20, 16 идвуплечих рычагов 36, 27 связаны с элементами жестких проводок следующих систем управления: – элеронами (см. рис. 23.25 г, тяги 4); – РВ (см. рис. 23.25 в, тяги 6, 35 и 24); – РН (см. рис. 23.25 б, тяга 5 и демпферы РАУ 17). Выходные валы РМ связаны с потенциометрами обратной связи АП и при согласовании их мостиковых схем электромоторы РМ останавливаются, а управляющие перемещения в проводках управления от РМ прекращаются до нового момента рассогласования в мостиковых схемах АП из-за изменения в пространственном положении самолета. Для обеспечения затуханий боковых колебаний самолета на всех режимах полета (при включенном АП) используют двухканальный демпфер рыскания, исполнительные механизмы которого рулевые агрегаты управления (РАУ) (см. поз. 17 на рис. 23.24 а, б). Демпфер реагирует на изменение угловых скоростей самолета, ход его штока пропорционален угловой скорости ω у. Демпфер автоматически включается при работающем ГУ и отключенном АП и отключается автоматически при включении АП и выключении ГУ. Рули и элероны снабжены триммерами. Триммер РВ используется только при балансировке самолета относительно оси Z, а триммеры РН и элеронов, кроме этого, служат еще для разгрузки путевого и поперечного управления самолетом от чрезмерных аэродинамических нагрузок. Управление триммерами электромеханическое (см. рис. 23.25 е). Рули от разбалтывания ветром на стоянке стопорятся механически. Для этого используется система с механизмами стопорения рулей. На рис. 23.25 б (поз. 30, 31, 32) представлен общий вид механизма стопорения РН и ограничители углов отклонения РН. Система стопорения сблокирована с секторами управления двигателей, что предотвращает взлет с застопоренными рулями. Все жесткие тяги проводки управления (поз. 4, 5, 6 на рис. 23.25) проложены на поддерживающих качалках и в роликовых направляющих (см. рис. 23.12 к, л). Зазор между тягами и текстолитовыми роликами направляющих, посаженными на оси на подшипниках, не более 0,6 мм. Качалки – литые с подшипниками во всех сочленениях и внутри ступиц. Тяги изготовлены из дюралевых анодированных и загрунтованных труб диаметром 40...45 мм. Они могут регулироваться по длине.
Тросы оцинкованы. Они имеют предварительную вытяжку при нагрузке до 60%от разрушающей. Регулировка тросов производится тандерами (см. рис. 23.9 д). Все выводы проводки управления из гермокабины герметизированы. Кроме уже рассмотренных выше позиций, на рис. 23.25 показаны: 8 – ЭМ в системе управления элеронами; 9 – направляющие для тяг; 10 – тяги; 11 – двуплечая качалка; 13 – интерцепторы; 14 – гермовыводы; 23 – электромеханизм управления стабилизатором; 24 – тяга в киле к РВ; 26 – барабан; 29 – карданный вал РН; 33 – задний лонжерон киля; 39 – ролик для троса 40 от РМ к сектору 38. На рис. 23.25 б показана схема подключения РМ РН; на рис. 23.25 в – схема подключения РМ РВ; на рис. 23.25 г – схема подключения РМ элеронов. Дальнейшее развитие систем управления может быть связано с уменьшением запаса статической устойчивости самолета, обеспечивающим повышение аэродинамического качества самолета из-за снижения потерь на балансировку самолета и выигрыш в массе за счет снижения площади и массы ГО. Однако это потребует введения в систему управления автоматов продольной устойчивости. Представляет также интерес введение систем активного управления для перераспределения с помощью подвижных частей крыла воздушных нагрузок на крыле для уменьшения изгибающих моментов. Последнее может быть использовано для уменьшения массы крыла или увеличения перегрузок на маневре n у. Перспективен переход на электродистанционное насыщенное компьютерами с большой степенью резервирования управление с боковыми ручками управления вместо традиционных штурвальных колонок. Это позволяет высвободить большой объем пространства в кабине экипажа, получить более высокие точностные характеристики при передаче управляющих сигналов, повысить еще более надежность системы управления и безопасность полета. СРЕДСТВА АВТОМАТИЗАЦИИ Общие положения Два условия определяют пути обеспечения безопасности при отказе автоматики: I. t рас > t пер; II. U отк < U доп, где t рас – располагаемое время – время развития отказа до наступления опасных последствий; t пер – время, необходимое летчику на переключение его действий (по статистике t пер = 2...5 с); U отк – вероятность возникновения в управлении опасных отказов (уровень риска); U доп – допустимое значение уровня риска;
U отк = 1 – Р без (здесь Р без – уровень безопасности). Первое условие учитывает совместные действия летчика и автоматики. При его соблюдении отказ может быть потенциально опасным, но летчик успеет включиться в управление и предотвратить опасность. Увеличить t рас можно, уменьшив скорость развития реакции системы на отказ, например, уменьшив обусловленный отказом угол отклонения руля (см. далее описание работы демпфера). Уменьшение t пер достигается ранним обнаружением отказа за счет сигнализации, однако по статистике и в этом случае t nep > 1 с. Условие I подразумевает, что главную роль играет летчик, технические средства в этом случае могут быть просты, но надежны. Условие II обусловливает обеспечение безопасности независимо от летчика. Его выполнение требует обеспечения высокого уровня надежности системы и достигается многократным резервированием элементов, что приводит к усложнению и удорожанию аппаратуры, а также значительному увеличению трудоемкости технического обслуживания и контроля. При многократном резервировании используется принцип кворумирования, т. е. определения верного сигнала по большинству правильно работающих в данный момент элементов. При этом обеспечивается возможность отключения неисправного элемента или устройства без нарушения работоспособности системы. Большое значение в обеспечении надежности управления имеют устройства непрерывного контроля в полете главных параметров, характеризующих работоспособность системы и выдающих информацию о возникающих отказах на пульты пилота и бортинженера. Увеличение надежности достигается также разделением рулевых поверхностей на секции, каждая из которых управляется рулевыми приводами от различных гидравлических систем. В настоящее время в авиации для более надежного обеспечения безопасности полета используются полуавтоматические системы управления. Полностью автоматизируются только режимы полета и функции управления, на которых вмешательство летчика не может предотвратить опасных последствий полета.
ВОПРОСЫ
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-01-20; просмотров: 844; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.93.210 (0.026 с.) |