
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип дії радіолокаційної станції П-37
Спрощена функціональна схема РЛС зображена на рис. 4.40. Радіолокаційна станція виявлення може працювати в одному з трьох режимів: пасивному, активному та у режимі селекції рухомих цілей (СРЦ). У пасивному режимі РЛС випромінює сформовані передавачем радіоімпульси. Передавач виконаний на базі магнетронного генератора. Відбиті від цілей, місцевих предметів і від гідрометеорологічних утворень сигнали приймаються тією ж антеною і надходять до приймача. Приймач виконаний за супергетеродинною схемою з однократним перетворенням частоти (ПЧ) (f ПЧ = 30 МГц). У приймачі виконуються: а) підсилення амплітуди сигналів; б) перетворення частоти; в) детектування. Від виходу приймача відеоімпульси подаються до індикаторного пристрою, де формуються мітки від усіх літаків, а також утворюються засвічення від місцевих предметів і хмарності, що знаходяться в зоні огляду РЛС (рис. 4.41, а). Для відліку полярних координат цілей на екрані індикатора кругового огляду (ІКО), який виконаний на базі електронно-променевої трубки, утворюється масштабна сітка азимута та дальності. З цією метою до складу РЛС входять генератори масштабних міток дальності (ММД) та масштабних міток азимута (ММА). Недоліками пасивного режиму є невелика дальність дії (через малу потужність відбитих сигналів) і наявність засвічень від завад, в яких може маскуватися мітка цілі.
Рис. 4.41. Вигляд індикаторів РЛС у пасивному (а) та активному (б) режимах
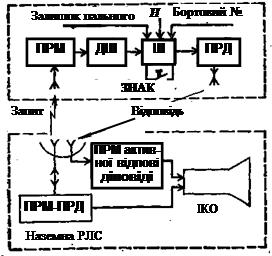
Активний режим використовується для збільшення дальності виявлення, індивідуального розпізнавання цілей, а також для усунення засвічень від завад. У цьому режимі РЛС працює разом з літаковими відповідачами активної відповіді (рис. 4.42).
Рис. 4.42. Активний режим роботи РЛС Літаковий відповідач являє собою ретранслятор сигналів запиту РЛС. Він складається з приймача (ПРМ), дешифратора (ДШ), шифратора (Ш) і передавача (ПРД). Відповідачі активної відповіді встановлюються на бойових та транспортних літаках, а також на літаках цивільної авіації. Сигнали запиту наземної РЛС приймаються антенами літакового відповідача і надходять до приймача. Від виходу приймача утворені відеосигнали подаються до дешифратора, в якому вони декодуються. Утвореним імпульсом декодування запускається шифратор, який утворює кодовану послідовність імпульсів. У цю послідовность способом кодування вводиться інформація про бортовий номер літака, висоту польоту та залишок пального. Утвореною послідовністю запускається передавач, радіоімпульси від виходу якого надходять до антени для випромінювання.
Кодований радіосигнал відповіді від літакового відповідача приймається приймачем активної відповіді наземної РЛС, в якому він перетворюється на відеосигнал і декодується. Отриманий в результаті декодування сигнал від виходу приймача подається до індикаторного пристрою РЛС для отримання мітки від літака. Міток від літаків, на яких не встановлені літакові відповідачі активної відповіді, а також засвічень від місцевих предметів і хмарності у цьому режимі на індикаторі не буде, тому що мітки з’являються тільки при прийманні кодованих сигналів від літакового відповідача. Вигляд індикатора РЛС в активному режимі зображено на рис. 4.41, б. Дальність дії РЛС у активному режимі більша, ніж у пасивному. Це пояснюється тим, що потужність сигналу відповіді літакових відповідачів значно більша за потужність відбитих від цілі сигналів. Для індивідуального розпізнавання літаків, обладнаних відповідачами, льотчик за командою керівника польотів натискає кнопку ЗНАК (рис. 4.42). При цьому видозмінюється сигнал відповіді і на екрані наземної РЛС від даного літака з’являється яскрава мітка (див. рис. 4.41, б). Додаткова інформація (висота польоту, залишок пального, бортовий номер) відображається на виносних цифрових індикаторах на КДП. Державна належність виявлених РЛС цілей визначається за допомогою наземного радіолокаційного запитувача (НРЗ), який працює спільно з РЛС. Запитувач являє собою малопотужну РЛС імпульсного типу. Щоб отримати мітки розпізнавання безпосередньо на індикаторі РЛС, запитувач запускається імпульсами синхронізатора РЛС. Крім того, обертання антен запитувача і РЛС синхронізовані у часі та за напрямком. Зовнішній вигляд НРЗ зображений на рис. 4.43.
Рис. 4.43. Зовнішній вигляд наземного радіолокаційного запитувача
Наземний радіолокаційний запитувач працює у ІІІ-му (668 МГц) та VII-му (1 532 МГц) діапазонах радіохвиль. Дальність виявлення на висоті 3 000 м становить приблизно 200 км. Максимальна висота виявлення цілей – 40 км. Наземний радіолокаційний запитувач має антену з діаграмою спрямованості косекансного типу, а також має дистанційний пульт управління, який може бути розміщений на відстані до 2 км від НРЗ. Оскільки антени обертаються синхронно, то сигнали запиту від НРЗ приймаються літаковим відповідачем державного розпізнавання тільки в момент опромінення літака зондувальними імпульсами РЛС. У відповідь на сигнали запиту літаковий радіолокаційний відповідач державного розпізнавання утворює і випромінює кодовані радіосигнали відповіді. У приймачі НРЗ сигнали відповіді перетворюються і декодуються. Отриманий після декодування відеоімпульс надходить до індикаторного пристрою РЛС і утворює поруч з міткою цілі мітку розпізнавання (див. рис. 4.41, б). Режим селекції рухомих цілей використовується для виявлення рухомих цілей на фоні нерухомих та малорухомих об’єктів. Усунення засвічень від нерухомих об’єктів досягається ввімкненням у роботу у цьому режимі додаткової схеми селекції рухомих цілей (СРЦ). Принцип роботи схеми СРЦ полягає у використанні явища зміни фази відбитих сигналів від рухомих об’єктів (ефект Доплера). Дійсно, нехай сигнал, який випромінюється наземною РЛС, має частоту f 0, тобто вираз для сигналу можна записати у вигляді
Тоді вираз для відбитого сигналу від рухомої цілі має вигляд
де τз– час затримки, який змінюється зі зміною дальності між літаком і РЛС (
З наведеного виразу видно, що фаза сигналу, відбитого від рухомих об’єктів, дорівнює:
тобто постійно змінюється. Фаза ж сигналу, відбитого від нерухомих об’єктів, – постійна. Унаслідок цього амплітуда відеоімпульсів від рухомої цілі на виході фазового детектора приймального пристрою РЛС змінюється (рис. 4.44, б), а амплітуда відеоімпульсів від нерухомих об’єктів – постійна (рис. 4.44, а).
Рис. 4.44. Часові діаграми відеоімпульсів на виході детектора для нерухомої (а) та рухомої цілей (б)
Частота Доплера для рухомих цілей залежить від радіальної швидкості цілі V р.ц (швидкості зближення цілі з РЛС) і визначається за таким співвідношенням
Рис. 4.45. Визначення вектора радіальної швидкості цілі
Для заглушення сигналів від нерухомих об’єктів використовується схема черезперіодної компенсації (рис. 4.46), яка складається з лінії затримки (ЛЗ) на період зондувальних імпульсів Т п, інвертора (у якому полярність затриманих імпульсів змінюється на протилежну) і суматора. У результаті додавання імпульси однакової амплітуди компенсуються, а імпульси різної амплітуди дають некомпенсований залишок. Утворені вихідні імпульси схеми додавання подаються до входу індикаторного пристрою для отримання мітки від рухомої цілі. Міток від нерухомих цілей на індикаторі у цьому режимі не буде, оскільки немає сигналу від цих об’єктів на виході пристрою додавання.
Радіолокаційна станція П-37 разом з наземним радіолокаційним запитувачем, рухомим радіовисотоміром (ПРВ), апаратурою «Фаза» для передачі радіолокаційної інформації від РЛС до виносних ІКО «Пикет», установлених на командному пункті, утворюють дальню радіолокаційну групу (ДРЛГ). Розміщуються РЛС виявлення П-37 на аеродромах на відкритих піднесених площадках (насипах). Поблизу від РЛС не повинно бути високих будівель, лісу і т. п.
Рис. 4.46. Схема компенсації сигналів від нерухомих цілей
|
|||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 170; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.191.234.191 (0.013 с.) |




 .
. ,
, );
); – постійний фазовий зсув при відбитті радіохвиль від літака.
– постійний фазовий зсув при відбитті радіохвиль від літака. ,
,
 , де λ0 – робоча довжина хвилі РЛС. Визначення вектора радіальної швидкості цілі зображено на рис. 4.45.
, де λ0 – робоча довжина хвилі РЛС. Визначення вектора радіальної швидкості цілі зображено на рис. 4.45.




