Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Принцип дії РСБН-5С у режимі «Навігація»
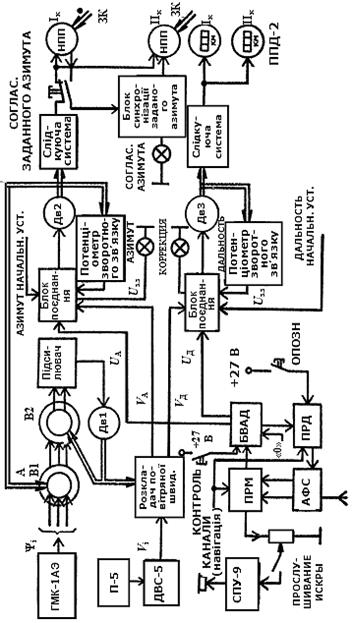
Апаратура РСБН-5С може працювати в одному з трьох режимів: «Навігація», «Пробивання хмарності донизу» та «Посадка». У режимі «Навігація» визначаються: - азимут літака за приладом НПП із точністю ±2°; - дальність відносно радіомаяка РСБН за приладом ППД-2 з точністю ±(0,2 + 0,03 % Д) км; - положення літака відносно лінії заданого курсу (азимута) за курсовою планкою приладу НПП. Вимірювання азимута і дальності здійснюється одночасно радіоканалом і каналом автономного зчислення. Радіоканал постійно і автоматично корегує координати автономного зчислення. Розглянемо роботу радіоканалу РСБН-5С у режимі «Навігація» за функціональною схемою, яка зображена на рис. 2.2. Вимірювання азимута радіоканалом виконується часовим методом. Суть цього методу полягає у вимірюванні часового інтервалу між моментом часу приймання збіжних опорних імпульсів серій «35» і «36» (момент «Північний збіг») і моментом часу приймання азимутального сигналу від РМ РСБН. Сигнали наземного радіомаяка (опорні «35», «36» і азимутальний) приймаються антенами апаратури РСБН-5С і через антенно-фідерну систему (АФС) надходять до входу приймача (ПРМ), який виконаний за супергетеродинною схемою без підсилювача високої частоти. Приймач має два частотні канали: азимутальний 905…932 МГц та далекомірний 940…967 МГц. Працює приймач на 40 фіксованих частотах (зміною 10 кварців гетеродина грубої сітки та 4 кварців гетеродина точної сітки). Дешифратор опорних сигналів «35», «36» та сигналів «Відповідь дальності» працює на 4-х кодах. Тобто апаратура РСБН-5С в режимах «Навігація» та «Посадка» має 40 частотно-кодових каналів. У приймачі відбуваються такі перетворення: - частотна селекція сигналів; - підсилення амплітуди прийнятих сигналів; - перетворення частоти сигналів у змішувачі; - детектування сигналу; - декодування опорних сигналів «35» і «36» та позивних РМ РСБН. Приймач СПАД-2И складається з таких функціональних елементів: змішувач сигналів, гетеродин з кварцовою стабілізацією частоти, підсилювачі проміжної частоти (ППЧ-ДФ, ППЧ-А), дешифратор сигналів «35» і «36» та позивних, формувач азимутального імпульсу, блок посадки. Опорні імпульси «35», «36» являють собою кодовані двоімпульсні посилки з частотами надходження 58,3 та 60 Гц відповідно. Азимутальний сигнал надходить з частотою 1,67 Гц, оскільки швидкість обертання наземної антени РМ РСБН становить 100 обертів за хвилину. Від виходу приймача опорні імпульси «35», «36» і азимутальний сигнал надходять до блока вимірювання азимута і дальності (БВАД).
У блоці вимірювання азимута та дальності (БВАД) вимірюється часовий інтервал між моментом часу формування сигналу «Північний збіг» і моментом часу надходження від приймача азимутального сигналу. Вимірювання азимута виконується за допомогою 15-розрядного двійкового цифрового лічильника, який складається з лічильника грубого вимірювання (0…180°, 180…360°) та лічильника точного вимірювання (0…10°). Генератор вимірювальних імпульсів лічильника працює на частоті 30,720 кГц. Лічильник виконаний на тригерах. У лічильнику є схема контролю наявності імпульсів «35» і «36» та азимутального сигналу. У момент збігу опорних імпульсів «35» і «36» («Північний збіг») відкривається лічильник і до його входу починають поступати імпульси від генератора вимірювальних імпульсів. Закривається лічильник азимутальним імпульсом. Лічильник має вихідний пристрій, в якому виміряний часовий інтервал азимута у вигляді двійкового коду перетворюється на постійну напругу за грубим і точним каналами. Величина утвореної напруги пропорційна азимуту. Утворена напруга азимута U А надходить від вихідного пристрою блока БВАД до блока поєднання БС. Одночасно до входу цього блока надходить напруга зворотного зв’язку U з.з, яка пропорційна раніше відпрацьованому значенню азимута і знімається від рухомих частин (повзунків) потенціометрів зворотного зв’язку. Напруга розузгодження Δ U А = U А – U з.з, яка утворюється у блоці поєднання, перетворюється на змінну напругу з частотою 400 Гц і надходить до двигуна Дв2 відпрацьовування азимута. Двигун працює доти, доки напруга неузгодженості внаслідок зміни U з.з стане дорівнювати нулю. Кут повороту осі двигуна за допомогою слідкуючої системи передається до навігаційно-пілотажного приладу НПП. За наявності розузгодження у каналі вимірювання азимута менше 0,5° на щитку управління РСБН-5С світиться лампа КОРРЕКЦИЯ АЗИМУТ. При цьому у задній кабіні засвічується інформаційне табло АЗИМУТ ТОЧНО.
Для перевірки азимутального каналу і компенсації можливих помилок початкового значення азимута передбачений спеціальний режим «Контроль нуля азимута». При натисканні на кнопку УСТ. НУЛЯ АЗИМУТА на ЩУ азимутальний сигнал формується з імпульсу «Північний збіг», тобто з прийнятих імпульсів серій «35», «36». Азимутальна стрілка при цьому має встановитися на значенні +1°. Є можливість коригування відпрацьованого значення азимута за допомогою потенціометра, який встановлений на ЩУ. Контроль нуля азимута можливий тільки в тому випадку, коли на борту приймаються опорні сигнали «35» і «36» від наземного радіомаяка. Відпрацьоване значення азимута відображається на приладі НПП за внутрішньою поворотною шкалою курсів відносно стрілки з кружком (рис. 2.3). Ціна поділки шкали становить 2°. За зовнішньою (нерухомою) шкалою НПП, відносно прямого кінця стрілки азимута, знімаються показання курсового кута радіомаяка (ККРМ). Ціна поділки зовнішньої шкали ККРМ становить 10°. Крім цього на лицевій панелі НПП є широка стрілка заданого курсу (азимута) та кремальєра ручного встановлення заданого курсу з позначенням ЗК. Для індикації сигналів відхилення літака від заданої траєкторії в режимі «Посадка» НПП має курсову та глісадну планки положення, а для індикації працездатності – курсовий (К) та глісадний (Г) бленкери. Канал азимута НПП виконаний на базі сельсин-приймача, статор якого механічно пов’язаний з віссю шкали поточного курсу, а ротор – з віссю стрілки азимута. Привід стрілки азимута управляється двигуном.
Рис. 2.3. Навігаційно-пілотажний прилад НПП (1485МК)
Канал курсу НПП виконаний на базі сельсина-приймача, ротор якого механічно пов’язаний з віссю шкали поточного курсу, а статор з нерухомим індексом відрахування курсу (з корпусом приладу). Управління приводом шкали поточного курсу здійснюється двигуном. Канал заданого курсу виконаний на базі сельсин-приймача, ротор якого механічно пов’язаний з віссю стрілки курсозадатчика. Привід цієї стрілки управляється двигуном або вручну. Обертати кремальєру ЗК при знеструмленні апаратури РСБН-5С та ГМК-1А – заборонено. Канал курсового кута радіомаяка (ККРМ) виконаний на базі сельсин-приймача, статор якого механічно пов’язаний з корпусом приладу, а ротор з віссю стрілки азимута. Для підсвічення лицевої частини приладу використовуються лампи з червоним світлофільтром, встановлені на лицевій частині. Прилад НПП задньої кабіни підключений паралельно до НПП передньої кабіни. Вимірювання дальності до наземного радіомаяка здійснюється часовим методом. З цією метою вимірюється часовий інтервал між сигналом «Запит дальності», який випромінюється літаковою апаратурою РСБН-5С, та сигналом «Відповідь дальності», який випромінює передавач ретранслятора дальності (РД) наземного радіомаяка системи РСБН. Сигнал «Запит дальності» утворюється у такий спосіб. Блок вимірювання азимута і дальності (БИАД-04) генерує імпульсний сигнал нестабільної частоти 30 Гц тривалістю 6,6 мс для запуску бортового передавача (СЗД-ПМ). Цим сигналом модулюється високочастотний сигнал генератора передавача. Частота передавача (772…808 МГц) стабілізується за допомогою кварцових резонаторів. Передавач має шифратор, який кодує сигнал запиту. Усього передавач має 10 фіксованих частот та 4 коди шифратора. Тобто передавач працює на 40 частотно-кодових каналах.
Модульований високочастотний сигнал передавача надходить до АФС і випромінюється антенами. На землі цей сигнал приймається приймачем ретранслятора далекоміра радіомаяка РСБН. У відповідь на запит передавач ретранслятора далекоміра випромінює сигнал відповіді, який приймається АФС і надходить до приймача (СПАД-2И), де перетворюється та декодується. Від виходу приймача утворений імпульс «Відповідь дальності» надходить до субблока вимірювання дальності блока БВАД (див. рис. 2.2). У блоці БВАД часовий інтервал між моментами часу сигналів «Запит дальності» і «Відповідь дальності» вимірюється 12-розрядним двійковим цифровим лічильником, який складається з лічильника грубого вимірювання та лічильника точного вимірювання (0…20 км). Генератор вимірювальних імпульсів лічильника працює на частоті 959,338 кГц. Період повторення імпульсів пропорційний дальності 156 метрів. Лічильник виконаний на тригерах. До складу лічильника входить схема контролю наявності імпульсів «Відповідь дальності», яка видає до входу блока сигнал «Супровід дальності». За відсутності сигналу «Супровід дальності» утворюється керуючий сигнал, який подається до блока управління АФС для перемикання антен. Відкривається лічильник сигналом «Запит дальності» і до його входу починають поступати імпульси від генератора вимірювальних імпульсів. Закривається лічильник імпульсом «Відповідь дальності». Лічильник має вихідний пристрій, в якому виміряний часовий інтервал дальності у вигляді двійкового коду перетворюється на постійну напругу за грубим і точним каналами, величини яких пропорційні дальності. Утворена напруга дальності U д надходить від вихідного пристрою блока БВАД до блока поєднання БС-02. Одночасно до другого входу цього блока надходить напруга зворотного зв’язку U з.з, яка пропорційна раніше відпрацьованому значенню дальності і знімається від повзунків потенціометрів зворотного зв’язку. У блоці поєднання БС-02 утворюється напруга розузгодження Δ U д = U д – U з.з, яка після перетворення у напругу з частотою 400 Гц та підсилення надходить до двигуна Дв3 відпрацьовування дальності. Двигун працює доти, доки напруга розузгодження, внаслідок зміни напруги зворотного зв’язку, стане дорівнювати нулю.
Кут повороту осі двигуна Дв3 за допомогою слідкуючої системи передається до приладу ППД-2. Грубий канал вимірювання дальності має потенціометричну слідкуючу систему, а точний канал – сельсинну. За наявності розузгодження у каналі вимірювання дальності менше 0,5 км на щитку управління РСБН-5С засвічується лампа КОРРЕКЦИЯ ДАЛЬН. При цьому у задній кабіні засвічується інформаційне табло ДАЛЬНОСТЬ ТОЧНО. Схема вимірювання дальності може працювати у двох режимах: «Пошук» та «Слідкування». У режимі «Пошук» схема вимірювання дальності утворює пошуковий строб (прямокутний імпульс), який постійно зміщується по часовій осі і, таким чином, виконує «огляд» по дальності, тобто шукає імпульс «Відповідь дальності» на свій запит. Оскільки частота запиту (F = 30 Гц) є нестабільною (не стабілізована кварцовим резонатором), то схема вимірювання дальності реагує тільки на відповідь свого запиту. При п’ятикратному збігу імпульсу відповіді з пошуковим (контрольним) стробом схема переходить в режим слідкування за цим імпульсом. Тому не виникає помилок у вимірюванні дальності, наприклад не відбувається захоплення сигналу «Відповідь дальності» інших літаків або імпульсних завад. Після восьмикратного зникнення сигналу «Відповідь дальності» схема вимірювання дальності перемикається в режим пошуку і пошуковий строб знову починає рух по годинниковій стрілці для пошуку сигналу «Відповідь дальності» на свій запит. Прилад ППД-2 (рис. 2.4) має двигун, редуктор, лічильний механізм та бленкерну систему масштабу. При дальності більше 495 км з’являється бленкер «×10» з одночасним зменшенням показань дальності на лічильнику у 10 раз. Прилад має ціну поділки 0,1 км. На літаках Л-39 і Л-39М1 бленкер масштабу не використовується.
Рис. 2.4. Прилад дальності ППД-2 Внутрішній контроль Загальною для каналів вимірювання азимута і дальності є схема внутрішнього контролю. При натисканні на кнопку КОНТРОЛЬ на пульті управління РСБН-5С на приладах НПП установлюється азимут 177° (±2°), а на приладах ППД-2 – дальність 291,5 км (±0,3 км). У режимі контролю з відповідних регістрів блока вимірювання азимута і дальності БИАД-04 знімаються напруги, які надходять до входу блока відпрацювання БО-М. Тому в цьому режимі не перевіряється робота приймача СПАД-2И та передавача СЗД-ПМ.
Селектор азимута Схема «Селектор азимута» (рис. 2.5) призначена для формування сигналу відхилення літака від лінії заданого курсу (азимута), який задається за допомогою кремальєри ЗК приладу НПП у передній кабіні.
Рис. 2.5. Функціональна схема селектора курсу (азимута)
Схема працює у режимах «Навігація» та «Пробивання хмарності донизу». Сигнал відхилення формується шляхом порівняння заданого і поточного значень азимутів. У результаті порівняння утворюється сигнал похибки у вигляді змінної напруги, який після перетворення на постійну напругу надходить до курсової планки приладів НПП.
Порівняння поточного і заданого курсів (азимутів) виконується за допомогою двох сельсинів: сельсин-датчика поточного азимута В1 і сельсин-приймача В2 заданого азимута у НПП. У разі розузгодження «за положенням» між сельсин-датчиком і сельсин-приймачем на роторній обмотці сельсин-приймача виникає змінна напруга, яка надходить до підсилювача. Підсилений сигнал від виходу підсилювача надходить до фазочутливого випрямляча (ФЧВ), який утворює постійну напругу позитивної чи негативної полярності. Утворена напруга надходить до курсової планки приладів НПП. Сигнал неузгодженості має різний масштаб залежно від віддалення літака від радіомаяка. При віддаленні до 132 км відхилення курсової планки приладу на четверту точку відповідає відхиленню поточного азимута від заданого на 14° (±6°), а при віддаленні на 132 км та більше – на 8° (±4°).
Синхронізація заданого азимута Для контролю інструктором правильності встановлення заданого курсу (азимута) на приладі НПП у передній кабіні у складі РСБН-5С є схема синхронізації заданого азимута (рис. 2.5). При натисканні у задній кабіні кнопки СОГЛАС. ЗАДАННОГО АЗИМУТА сельсин-приймач В2 відключається від сельсин-датчика поточного азимута В1 і перемикається до блока синхронізації заданого курсу 1455А. При цьому схема селектора азимута відключається. Сельсин-приймач В2 є тепер сельсином-датчиком для сельсина В4 приладу НПП задньої кабіни. Сигнал розузгодженості «за положенням» ротора сельсин-приймача задньої кабіни надходить до входу підсилювача. Підсилений сигнал розузгодженості від виходу підсилювача надходить до двигуна Дв приладу НПП задньої кабіни, який повертає широку стрілку заданого азимута до положення узгодження. При цьому в передній кабіні світиться інформаційне табло СОГЛАС. АЗИМУТА. Після відпускання кнопки СОГЛАС. заданного АЗИМУТА гасне лампа-табло СОГЛАС. АЗИМУТА і починає працювати схема селектора азимута.
|
||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-26; просмотров: 329; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.190.156.80 (0.035 с.) |