Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Метод перемещений в расчетах статически неопределимых системСтр 1 из 2Следующая ⇒
Основная система метода перемещений
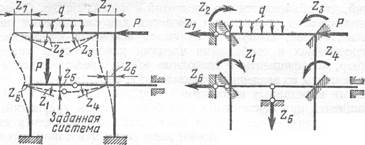
После определения числа неизвестных образуют основную систему метода перемещений путем наложения на узлы заданной системы связей, препятствующих их перемещениям. В соответствии с принятыми неизвестными эти связи бывают двух типов: связи, препятствующие повороту узлов (защемления), и связи, препятствующие линейным перемещениям узлов (опорные стержни) (рис. 4). Заметим, что вводимые в основную систему метода перемещений защемляющие связи отличаются от обычной жесткой заделки тем, что оказывают препятствие лишь повороту узла и не лишают его линейной подвижности. Общее число вводимых в основную систему связей равно, естественно, числу неизвестных метода перемещений. На рис. 4 представлены примеры образования основных систем метода перемещений и показаны предполагаемые направления неизвестных перемещений. При этом здесь, как и в дальнейшем, все перемещения вне зависимости от их типа (угол поворота или поступательное смещение) обозначены для общности единым символом Zi.
Рис. 3
Для определения основных неизвестных Zi записывают систему канонических уравнений метода перемещений: r11Z1 + r12Z2 +... + rlnZn + RlP = 0, r21Z1 + r22Z2 +... + r2nZn + R2P = 0, ............................ rn1Z1 + rn2Z2 +... + rnnZn + RnP = 0 Каждое из этих уравнений выражает условие, что суммарная реакция каждой наложенной на заданную систему связи равна нулю, так как в заданной системе эти связи отсутствуют. Так, в левой части первого уравнения стоит
Рис. 4. Основная система
суммарная реакция первой дополнительной связи, во втором уравнении — суммарная реакция второй дополнительной связи и т. д. Отсюда следует, что уравнения метода перемещений — статические в отличие от уравнений метода сил, которые имеют кинематический характер Входящие в канонические уравнения коэффициенты при неизвестных гik представляют собой реактивные усилия (моменты или силы), возникающие в связи i от единичного перемещения Zk связи k. Свободные члены этих уравнений Rip — реактивные усилия в связи i от внешней нагрузки. Единичные rik и грузовые Rip реакции имеют положительный знак в том случае, если их направления совпадают с заданным направлением перемещения Zt связи i. Коэффициенты с одинаковыми индексами ru, r22, rппназывают главными, а коэффициенты r12, r1 ik — побочными. Главные коэффициенты всегда положительны и не равны нулю, а побочные коэффициенты, как и в методе сил, обладают свойством взаимности, т. е. rik = rki. Благодаря этому система канонических уравнений метода перемещений симметрична относительно главной диагонали и ее можно решить при помощи сокращенного способа Гаусса.
Метод перемещений в расчетах статически неопределимых систем Общие сведения о методе перемещений СТЕПЕНЬ КИНЕМАТИЧЕСКОЙ НЕОПРЕДЕЛИМОСТИ
Под степенью кинематической неопределимости принято понимать число основных неизвестных метода перемещений — углов поворота и линейных перемещений жестких узлов системы. Это число зависит от допущений, принятых в методе: 1) концы стержней, сходящихся в одном жестком узле, т. е. связанные между собой припайками, поворачиваются на один и тот же угол; 2) не учитывается влияние N и Q на перемещения узлов; 3) расстояния между узлами при деформации изгиба прямых стержней не изменяются; 4) углы поворота по малости принимаются равными их тангенсам. Число угловых перемещений узлов определяется числом жестких узлов, которые независимо могут поворачиваться. При этом за жесткий узел принимается всякий узел, в котором не менее двух стержней соединены между собой припайкой. Число независимых поступательных перемещений узлов не равно числу узлов, которые могут поступательно перемещаться, так как на основании второго и третьего допущений не все поступательные перемещения могут быть независимы. Поступательные перемещения узлов рамы зависимы, и все они будут перемещаться по горизонтали на одинаковую величину. Поскольку расстояния между узлами, соединенными стержнем, при деформации не изменяются, то число независимых поступательных перемещений узлов заданной системы, составленной из прямых стержней, равно числу независимых перемещений узлов преобразованной системы, получаемой из заданной введением шарниров во все узлы, в том числе и опорные, считая все стержни преобразованной системы абсолютно жесткими. При этом все статически определимые консоли, если они есть в системе, должны быть предварительно отсечены.
За неизвестные поступательные перемещения принимаются независимые поступательные перемещения, число которых равно числу дополнительных связей, обращающих шарнирную схему в неизменяемую систему. Общее число угловых и независимых поступательных перемещений равно числу основных неизвестных метода перемещений или степени кинематической неопределимости. На рис. 1 показаны числа независимых перемещений узлов системы; пунктиром показаны связи, которые обращают шарнирную схему в неизменяемую систему.
Рис. 1
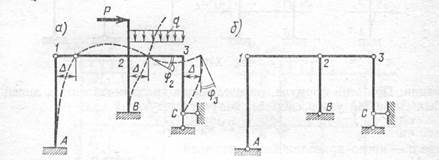
Как и метод сил, метод перемещений является одним из важнейших методов расчета статически неопределимых систем. В качестве основных неизвестных в этом методе принимают упругие перемещения узлов системы: углы поворота узлов и их линейные перемещения (рис. 2, а).
Рис. 2
Общее число неизвестных метода перемещений n, называемое степенью кинематической неопределимости системы, определяют как сумму неизвестных углов поворота nу и неизвестных линейных перемещений узлов nл: n = nу + nл. Число неизвестных углов поворота равно числу «жестких» узлов, вследствие чего определение nу сводится к простому подсчету числа «жестких» узлов рамы (например, узлы 2, 3 на рис. 2, а). Для определения числа линейных перемещений узлов пл вводится предположение о том, что длины хорд упругих линий прямых стержней рамы после их деформации остаются равными первоначальным длинам этих стержней, т. е. не учитывается сближение концов прямого стержня при его изгибе и действии продольной силы. В результате этого число независимых линейных смещений узлов заданной системы будет равно степени свободы шарнирной схемы, полученной из заданной системы введением шарниров во все узлы, включая и опорные. Таким образом, для рамы, представленной на рис. 1, а, число независимых линейных перемещений узлов будет равно: пл = 2У — С — С0 = 12 — 5 — 6 = 1, а общее число неизвестных при nу = 2 составит п = 2+1=3. В том случае, если заданная система содержит кроме прямых и криволинейные стержни (рис. 3), необходимо учитывать возможное сближение концов криволинейных стержней после их деформации. При этом формула, определяющая число независимых линейных смещений узлов системы, получит следующий вид: nл = а + 2У – С – С0, где а — число криволинейных стержней. Например, для рамы, изображенной на рис. 2, будем иметь: nл = 1 +12 —5 —6 = 2 и n = 3 + 2 = 5.
|
|||||||
|
|
Последнее изменение этой страницы: 2016-12-29; просмотров: 1022; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.106.232 (0.009 с.) |