
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Подавление статистических шумов
Подавление статестических шумов медианными фильтрами в связи с их нелинейностью обычно рассматривается только на качественном уровне. Нельзя также четко разграничить влияние медианных фильтров на сигнал и шум. Если значения элементов последовательности чисел {xi} в апертуре фильтра являются независимыми одинаково распределенными (НОР) случайными величинами со средним значением m x = m + z, то математическое ожидание M{z} = 0 и, следовательно, M{x}=m. Пусть F(x) и f(x)=F'(x) обозначают функции распределения и плотности вероятностей величин х. Согласно теории вероятностей, распределение у = med(х1,..., хn) для больших n является приблизительно нормальным N(mt, n), где mt - теоретическая медиана, определяемая из условия F(mt) = 0.5, при этом дисперсия распределения: sn2 = 1/(n 4f2(mt)). Приведенные результаты справедливы как для одномерной, так и для двумерной фильтрации, если n выбирать равным числу точек в апертуре фильтра. Если f(x) симметрична относительно m, то распределение медиан также будет симметрично относительно m и, таким образом, справедлива формула: M{med(х1,..., хn)} = M{xi} = m. Если случайные величины х являются НОР и равномерно распределены на отрезке [0, 1], то можно найти точное значение дисперсии медианы по формуле: sn2 = 1/(4(n+2)) = 3x /(n+2).
Если случайные величины х являются независимыми, одинаково распределенными с нормальным распределением N(m, ), то mt = m. Модифицированная формула дисперсии медианы для малых нечетных значений n: sg2» ps2/(2n-2+p). Значение дисперсии шумов для случайных величин в скользящем n-окне арифметического усреднения (фильтр МНК первого порядка) имеет значение 2/n. Это означает, что для нормального белого шума при равных значениях n окон медианного фильтра и фильтра скользящего усреднения, дисперсия шумов на выходе медианного фильтра приблизительно на 57% больше, чем у фильтра скользящего среднего. Чтобы медианный фильтр давал ту же дисперсию, что и скользящее усреднение, его апертура должна быть на 57% больше. При этом следует иметь в виду, что искажение полезных сигналов, особенно при наличии в них скачков и крутых перепадов, даже при большей апертуре медианного фильтра может оказаться меньше, чем у фильтров скользящего среднего. Положение изменяется, если плотность распределения случайных величин существенно отличается от нормального и имеет длинные хвосты, которые и ликвидируются медианным фильтром, что обеспечивает оптимальную и наиболее правдоподобную оценку текущих значений сигнала по минимуму среднеквадратического приближения. Так, при экспоненциальном (по модулю) распределении плотности шумов
f(x) = ( дисперсия шумов после медианного фильтра на 50% меньше, чем после фильтра скользящего среднего. Предельным случаем таких распределений является импульсный шум, случайный по амплитудам и месту появления, который и подавляется медианными фильтрами с наибольшей эффективностью. Импульсные и точечные шумы
При регистрации, обработке и обмене данными в современных измерительно-вычислительных и информационных системах потоки сигналов кроме полезного сигнала s(t-t0) и флуктуационных шумов q(t) содержат, как правило, импульсные потоки g(t)= x(t) = s(t-t0) + g(t) + q(t). Под импульсным шумом понимается искажение сигналов большими импульсными выбросами произвольной полярности и малой длительности. Причиной появления импульсных потоков могут быть как внешние импульсные электромагнитные помехи, так и наводки, сбои и помехи в работе самих систем. Совокупность статистически распределенного шума и потока квазидетерминированных импульсов представляет собой комбинированную помеху. Радикальный метод борьбы с комбинированной помехой - применение помехоустойчивых кодов. Однако это приводит к снижению скорости и усложнению систем приемо-передачи данных. Простым, но достаточно эффективным альтернативным методом очистки сигналов в таких условиях является двухэтапный алгоритм обработки сигналов x(t), где на первом этапе производится устранение из потока x(t) шумовых импульсов, а на втором – очистка сигнала частотными фильтрами от статистических шумов. Для сигналов, искаженных действием импульсных шумов, отсутствует строгая в математическом смысле постановка и решение задачи фильтрации. Известны лишь эвристические алгоритмы, наиболее приемлемым из которых является алгоритм медианной фильтрации.
Допустим, что шум q(t) представляет собой статистический процесс с нулевым математическим ожиданием, полезный сигнал s(t-t0) имеет неизвестное временное положение t0 Î [0, T], а поток шумовых импульсов g(t) имеет вид: g(t) = где ak - амплитуда импульсов в потоке, tk - неизвестное временное положение импульсов, ek=1 с вероятностью pk и ek=0 с вероятностью 1-pk. Такое задание импульсной помехи соответствует потоку Бернулли.
При применении к потоку x(t) скользящей медианной фильтрации с окном N отсчетов (N – нечетное) медианный фильтр полностью устраняет одиночные импульсы, удаленные друг от друга минимум на половину апертуры фильтра, и подавляет импульсные помехи, если количество импульсов в пределах апертуры не превосходит (N-1)/2. В этом случае, при pk = p для всех импульсов помехи, вероятность подавления помех может быть определена по выражению /3i/: R(p) =
Рис.1 На рис.1 приведены результаты расчетов вероятности подавления импульсной помехи медианным фильтром. При p<0.5 результаты статистического моделирования процесса показывают хорошее соответствие расчетным значениям. Для интенсивных импульсных шумовых потоков при p>0.5 медианная фильтрация становится мало эффективной, т.к. происходит не подавление, а усиление и трансформация его в поток импульсов другой структуры (со случайной длительностью). Если вероятность ошибки не очень велика, то медианная фильтрация даже с достаточно малой апертурой значительно уменьшит число ошибок. Эффективность исключения шумовых импульсов повышается с увеличением апертуры фильтра, но одновременно может увеличиваться и искажение полезного сигнала. Перепад плюс шум.
Рассмотрим фильтрацию перепадов при наличии аддитивного белого шума, т. е. фильтрацию последовательностей, или изображений, с x = s + z,
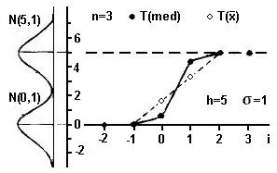
Рис. 2 где s - детерминированный сигнал, равный 0 по одну сторону or перепада и h — по другую, a z - случайные значения белого шума. Предположим, что случайные значения шума z распределены по нормальному закону N(0, s). Для начала рассмотрим одномерную фильтрацию и будем считать, что перепад происходит в точке i = 1, таким образом, что для i£0 величина xi есть N(0, s), а для i≥1 величина хi есть N(h, s).
На рис. 2 показана последовательность значений математического ожидания медиан и скользящего среднего вблизи перепада высотой h = 5 при N = 3. Значения скользящего среднего следуют по наклонной линии, что свидетельствует о смазывании перепада. Поведение математического ожидания значений медианы также свидетельствует о некотором смазывании, хотя в гораздо меньше, чем для скользящего среднего. Если воспользоваться мерой среднеквадратичной ошибки (СКО), усредненной по N точкам вблизи перепада, и вычислить значения СКО в зависимости от значений h, то нетрудно зафиксировать, что при малых значениях h<2 СКО для скользящего среднего немного меньше, чем для медианы, но при h>3 СКО медианы значительно меньше, чем СКО среднего. Этот результат показывает, что скользящая медиана значительно лучше, чем скользящее среднее, для перепадов большой высоты. Похожие результаты можно получить и для апертуры N=5, и для двумерной фильтрации с апертурами 3x3 и 5x5. Таким образом, математические ожидания медианы для малых h близки к математическим ожиданиям для соответствующих средних, но для больших h они асимптотически ограничены. Объясняется это тем, что при больших h (скажем, h>4) переменные х со средним значением 0 (для данного примера) будут резко отделены от переменных х со средним h.
Использованная мера точности может характеризовать только резкость поперек перепада и ничего не говорит о гладкости фильтрованного изображения вдоль перепада. Скользящее усреднение дает сигналы, гладкие вдоль перепада, тогда как при обработке с помощью медианным фильтром протяженные перепады оказываются слегка изрезанными. Фильтрация Винера
Инверсная фильтрация обладает низкой помехоустойчивостью, потому что этот метод не учитывает зашумленность наблюдаемого изображения. Значительно менее подвержен влиянию помех и сингулярностей, обусловленных нулями передаточной функции искажающей системы, фильтр Винера, т.к. при его синтезе наряду с видом ФРТ используется информация о спектральных плотностях мощности изображения и шума.
Спектральная плотность сигнала определяется соотношением:
где Взаимная спектральная плотность сигнала определяется соотношением:
где При построении фильтра Винера ставится задача минимизации среднеквадратического отклонения обработанного изображения от предмета:
где
Дальнейший анализ показывает, что восстановление изображения, формирование которого описывается выражением должно осуществляться с использованием следующего ОПФ восстанавливающего преобразователя:
Если шума на изображении нет, то спектральная плотность функции шума равна 0 и выражение, которое называют фильтром Винера, превращается в обычный обратный фильтр.
При уменьшении спектральной плотности мощности исходного изображения передаточная функция фильтра Винера стремится к нулю. Для изображений это характерно на верхних частотах.
На частотах, соответствующих нулям передаточной функции формирующей системы, передаточная функция фильтра Винера также равна нулю. Таким образом, решается проблема сингулярности восстанавливающего фильтра.
ОПФ Фильтры Винера
Инверсные фильтры Рис. 3. Примеры фильтров
Фильтрация изображений. Медианная фильтрация изображений наиболее эффективна, если шум на изображении имеет импульсный характер и представляет собой ограниченный набор пиковых значений на фоне нулей. В результате применения медианного фильтра наклонные участки и резкие перепады значений яркости на изображениях не изменяются. Это очень полезное свойство именно для изображений, на которых контуры несут основную информацию.
При медианной фильтрации зашумленных изображений степень сглаживания контуров объектов напрямую зависит от размеров апертуры фильтра и формы маски. Примеры формы масок с минимальной апертурой приведены на рисунке 4. При малых размерах апертуры лучше сохраняются контрастные детали изображения, но в меньшей степени подавляется импульсные шумы. При больших размерах апертуры наблюдается обратная картина. Оптимальный выбор формы сглаживающей апертуры зависит от специфики решаемой задачи и формы объектов. Особое значение это имеет для задачи сохранения перепадов (резких границ яркости) в изображениях. Под изображением перепада понимаем изображение, в котором точки по одну сторону от некоторой линии имеют одинаковое значение а, а все точки по другую сторону от этой линии - значение b, b ¹ a. Если апертура фильтра симметрична относительно начала координат, то медианный фильтр сохраняет любое изображение перепада. Это выполняются для всех апертур с нечетным количеством отсчетов, т.е. кроме апертур (квадратные рамки, кольца), которые не содержат начала координат. Тем не менее квадратные рамки и кольца будут лишь незначительно изменять перепад. Для упрощения дальнейшего рассмотрения ограничимся примером фильтра с квадратной маской размером N × N, при N=3. Скользящий фильтр просматривает отсчеты изображения слева-направо и сверху-вниз, при этом входную двумерную последовательность также представим в виде последовательного числового ряда отсчетов {x(n)} слева-направо сверху-вниз. Из этой последовательности в каждой текущей точке маска фильтра выделяет массив w(n), как W-элементный вектор, который в данном случае содержит все элементы из окна 3×3, центрированные вокруг x(n), и сам центральный элемент, если это предусмотрено типом маски: w(n) = [x1 (n),x2(n), …, xW (n)].
В этом случае значения xi соответствует отображению слева-направо и сверху-вниз окна 3×3 в одномерный вектор. Элементы данного вектора, как и для одномерного медианного фильтра, также могут быть упорядочены в ряд по возрастанию или убыванию своих значений: r(n) = [r1(n), r2(n), …, rW (n)], определено значение медианы y(n) = med(r(n)), и центральный отсчет маски заменен значением медианы. Если по типу маски центральный отсчет не входит в число ряда 8, то медианное значение находится в виде среднего значения двух центральных отсчетов ряда 9. Приведенные выражения не объясняют способа нахождения выходного сигнала вблизи конечных и пограничных точек в конечных последовательностях и изображениях. Один из простых приемов состоит в том, что нужно находить медиану только тех точек внутри изображения, которые попадают в пределы апертуры. Поэтому для точек, расположенных рядом с границами, медианы будут определены, исходя из меньшего числа точек.
Медианная фильтрация может выполняться и в рекурсивном варианте, при котором значения сверху и слева от центрального отсчета в маске (в данном случае x1(n)-x4(n) на рис. 9) в ряде 8 заменяются на уже вычисленные в предыдущих циклах значения y1(n)-y4(n).
|
||||||||||
|
|
Последнее изменение этой страницы: 2016-12-30; просмотров: 793; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.137.185.180 (0.031 с.) |
 /s exp(-
/s exp(-  |x-m| /s)
|x-m| /s) d(t-tk) различной интенсивности с регулярной или хаотической структурой:
d(t-tk) различной интенсивности с регулярной или хаотической структурой: ek ak g(t-tk),
ek ak g(t-tk), pm(1-p)N-p.
pm(1-p)N-p.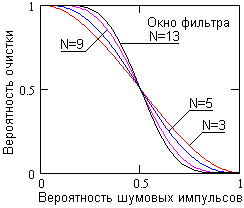

 – автокорреляционная функция.
– автокорреляционная функция. , (14)
, (14) – функция взаимной корреляции.
– функция взаимной корреляции. ,
, – математическое ожидание. Преобразуя эти выражения можно показать, что минимум достигается, когда передаточная функция определяется следующим выражением:
– математическое ожидание. Преобразуя эти выражения можно показать, что минимум достигается, когда передаточная функция определяется следующим выражением:
 .
.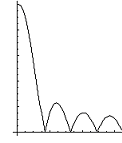


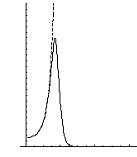

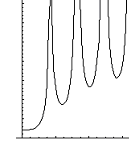
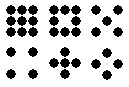 Рис.4
Рис.4



