
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности построения ЛАЧХ в высокочастотной области⇐ ПредыдущаяСтр 14 из 14
В ВЧ области при ω>2/Т ЛАЧХ непрерывной части могут иметь несколько вариантов (рис.10.2). Линия со штриховкой разделяет ВЧ и НЧ области. Характеристики отличаются тем, какой наклон имеют ЛАЧХ на частоте 2/Т. Эти ЛАЧХ аппроксимировать одним из следующих выражений. В первом случае (рисунок 10.2,а)
где Tq+1, …Tn – постоянные времени, сопрягающие частоты которых больше частоты 2/Т; ωВ – коэффициент передачи высокочастотной части, определяемый частотой пересечения первой асимптоты высокочастотной частью ЛАЧХ с осью нуля децибел (может совпадать с частотой среза ωср). Во втором случае (рисунок 10.2,б)
В третьем случае (рисунок 10.2,в)
Рисунок 10.2 – ЛАЧХ в ВЧ области На основании таблицы z-преобразования и используя постановку псевдочастоты jλ, получим для ЛАЧХ в НЧ диапазоне
где Выражение (10.16) может использоваться для построения ЛАЧХ, причем модуль равен
Таким образом, при построении ВЧ «хвоста» приходится учитывать Т∑ и дополнительный множитель (1-jλ/2). Для 2-го варианта (рисунок 10.2,б) получим
Для 3-го варианта (рис.10.2,в) получим
Выражения (10.16, 18,19) используются для построения ЛАЧХ и ФЧХ в высокочастотной части. На частоте
Рисунок 10.3 – Учет дискретизации в ВЧ области
Лекция 11. Цифровые регуляторы и АЦП Цифровой регулятор
Физически реализуемая ПФ цифрового регулятора имеет вид
где E(z) – z-преобразования входного и выходного сигналов регулятора. Определим обратное z-преобразование выражения (11.1)
Отсюда
Данное выражение показывает, что значение выходного сигнала регулятора зависит от текущего значения входного и предыдущего значения выходного сигналов. Для составления программы вычисления по формуле (11.3) необходимы 2 операции: - накопление данных в МК – предшествующие значения входного и выходного сигналов; - арифметические: умножение, сложение и вычитание. Пример. Дана ПФ цифрового регулятора
После перекрестного умножения, получим
Обратное z-преобразование равно
где Т – период квантования.
Блок-схема программы МК, реализующую ПФ цифрового регулятора, приведена на рисунке 11.1.
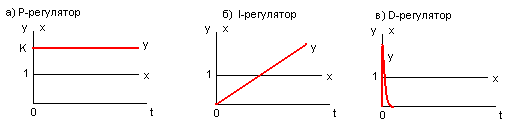
Рисунок 11.1 – Блок-схема программы ЦР Закон автоматического регулирования – это уравнение регулятора, выражающее управляющее воздействие u (выходную величину регулятора) через рассогласование и возмущение (его входные величины). По закону регулирования регуляторы делятся на: - пропорциональные или статические регуляторы (П – регуляторы); - интегральные или астатические регуляторы (И – регуляторы); - пропорционально-интегральные (ПИ – регуляторы); - пропорционально–дифференциальные регуляторы (ПД – регуляторы); - пропорционально–интегрально–дифференциальные (ПИД) регуляторы.
Рисунок 11.2 – Временные характеристики P,I,D-регуляторов Управляющее воздействие PID-регулятора пропорционально отклонению регулируемого параметра, интегралу и скорости этого отклонения. Пропорционально-интегрально-дифференциальный закон регулирования (ПИД – регулятор):
Рисунок 11.3 – Временные характеристики PI, PD и PID-регуляторов Параметрами настройки ПИД – регулятора являются: коэффициент передачи регулятора К, постоянная времени Ти и время предварения Тп. ПИД–регуляторы устанавливаются на инерционных объектах со значительным запаздыванием, где недопустимо остаточное отклонение параметра.
Рисунок 11.4 – Структурная схема ПИД-регулятора Если получить из (11.4) преобразование Лапласа, а затем z-преобразование, то структурная схема для цифрового ПИД-регулятора примет вид
Рисунок 11.5 – Структурная схема цифрового ПИД-регулятора
Численные аспекты
При реализации САУ возникает ряд вопросов численного характера: какова должна быть погрешность преобразователей (АЦП, ЦАП); с какой точностью должны производится вычисления. Для ответа на эти вопросы необходимо понимать характер влияния подобных ограничений на качество управления и устойчивость замкнутой системы. При ответе на эти вопросы ограничимся хотя бы грубыми оценками. 1. Влияние конечной длины слова. Основными источниками ошибок являются: - дискретизация в АЦП и ЦАП;
- округление и переполнение при выполнении операций. АЦП имеют точность 8,10,12 и 14 знаков, что соответствует разрешению (в процентах от максимальной измеряемой величины) 0.4; 0.1; 0.025; 0.006. Числа представляются различными способами: с фиксированной запятой, с одинарной и двойной точностью; с плавающей запятой с одинарной точностью. Округление и представление чисел с ограниченным количеством разрядов порождает сравнительно небольшие ошибки, в то время как переполнение преобразователей может привести к катастрофическим последствиям. Поэтому следует прежде всего согласовать требуемую длину слова со значениями преобразуемой переменной. 2. Эффекты квантования по уровню. АЦП осуществляет преобразование по уровню (рисунок 10.6,а). Ошибка квантователя зависит от количества разрядов, а сам квантователь является нелинейным устройством, математическую модель которого можно представить из 2-х элементов: линейного и нелинейного (генератор пилы) (рисунок 11.6,б).
Рисунок 11.6 – Передаточная характеристика АЦП и его мат. модель (б) Легко заметить, что при суммировании двух сигналов (линейного у=х и пилообразного) получается ступенчатый сигнал на выходе АЦП. Поэтому структурная схема модели АЦП будет иметь вид
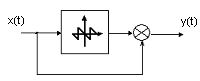
Рисунок 11.7 – Структурная схема АЦП Следует заметить, что квантование по уровню в замкнутых системах в общем случае может вызвать появление установившейся ошибки и незатухающих колебаний (автоколебаний). Приведем простой пример: даны две замкнутые ЦС (рисунок 11.8).
Рисунок 11.8 – Цифровые системы без квантователя (а) и с квантователем (б) ПФ замкнутой системы без квантователя (рисунок 11.7,а) равна
Из характеристического уравнения (11.5) видно, что корни левые и система устойчива, т.е. переходный процесс, обусловленный начальным значением х(0) при t→∞ стремится к нулю. Для системы (рисунок 11.8,б) предположим, что длина слова равна L=4бита. Тогда шаг квантования определяется для амплитуды сигнала g=1 как
Характеристики квантователя вычисляются для положительных сигналов следующим образом:
В результате моделирования на РС (L=4) можно получить значения выходного сигнала y[n] и установившейся ошибки e[n] для n=7 при x(n)=0 (таблица 11.1). Таблица 11.1 – Результаты расчета выходных значений систем
Из таблицы 11.1 видно, что при нулевом входе x[n]=0 на выходе обеих систем (рисунок 6.7) устанавливаются автоколебания с амплитудой g=0,0625 при n≥4 и периодом Т=2. Установившаяся ошибка и автоколебания в АЦП являются нежелательными, поэтому их стремятся по возможности минимизировать увеличением количества разрядов АЦП. Если в проектируемой системе предполагают установившуюся ошибку 5%, то инструментальная ошибка АЦП должна быть в 5 раз меньше, т.е. 1%. Если перед АЦП устанавливается датчик (скорости, положения, температуры и т.д.), то его погрешность должна не превышать также 1%. Количество разрядов можно приблизительно рассчитать по формуле
где Amax – амплитуда входного сигнала АЦП; ∆ - абсолютная погрешность в V(вольтах). При выборе типа микроконтроллера можно приблизительно рассчитать требуемую разрядность
где Nвыч – количество операции (команд) в программе. 3. Погрешности и скорость преобразования. Необходимая скорость АЦП определяется спектром частот аналогового сигнала или требуемой точностью преобразования. В соответствии с теоремой Котельникова для восстановления сигнала частота его отчетов должен быть по крайней мере вдвое больше наивысшей частоты спектра сигнала. ЛАЧХ АЦП имеет вид
Рисунок 11.9 – ЛАЧХ АЦП Предположим, что сигнал на входе АЦП близок к синусоидальному с частотой равной частоте среза ω = ωср u = Umax∙sinωt.
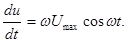
Рисунок 11.10 – Входной сигнал АЦП Определим производную входного сигнала по времени
В момент t=0 cosωt=1, тогда
Из (11.9) можно определить предельную частоту входного сигнала АЦП, при которой ошибка не превышает значения младшего значимого разряда (МЗР) преобразователя. Таблица 11.2 – Предельная частота входного сигнала АЦП
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-29; просмотров: 461; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.128.94.171 (0.035 с.) |
 (10.13)
(10.13) (10.14)
(10.14) (10.15)
(10.15)
 (10.16)
(10.16)
 (10.17)
(10.17) (10.18)
(10.18) (10.19)
(10.19) происходит сопряжение НЧ и ВЧ характеристик, например, для рисунка 10.2,б изменение ЛАЧХ при учете высокочастотной части представлено на рисунке 10.3 пунктиром.
происходит сопряжение НЧ и ВЧ характеристик, например, для рисунка 10.2,б изменение ЛАЧХ при учете высокочастотной части представлено на рисунке 10.3 пунктиром.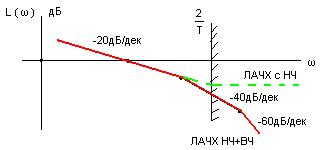
 , (11.1)
, (11.1) ,
,  ;
;
 (11.2)
(11.2) (11.3)
(11.3)



 (11.4)
(11.4)




 (11.5)
(11.5)

 (11.6)
(11.6) (11.7)
(11.7) , (11.8)
, (11.8)

 (11.9)
(11.9)


