Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
В каких случаях момент силы относительно оси равен 0? ⇐ ПредыдущаяСтр 3 из 3
Момент силы относительно оси равен нулю (MOz = 0), если:
Объединяя эти два случая, можно сказать: Условия равновесия произвольной пространственной системы сил? В геометрической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент системы равнялись нулю R = 0, Mo = 0. В аналитической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три координатные оси и суммы моментов всех сил относительно этих осей были равны нулю ΣFkx = 0, ΣFky = 0, ΣFkz = 0, Mx(Fk) = 0, My(Fk) = 0, Mz(Fk) = 0. Чтобы задача была статически определимой, число неизвестных должно быть не более шести.В частности, для системы параллельных сил условиями равновесия являются следующие равенства ΣFkx = 0, Mx(Fk) = 0, My(Fk) = 0. Раздел «Кинематика» 35. Каким уравнением определяется движение точки при векторном способе задания её движения? При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.
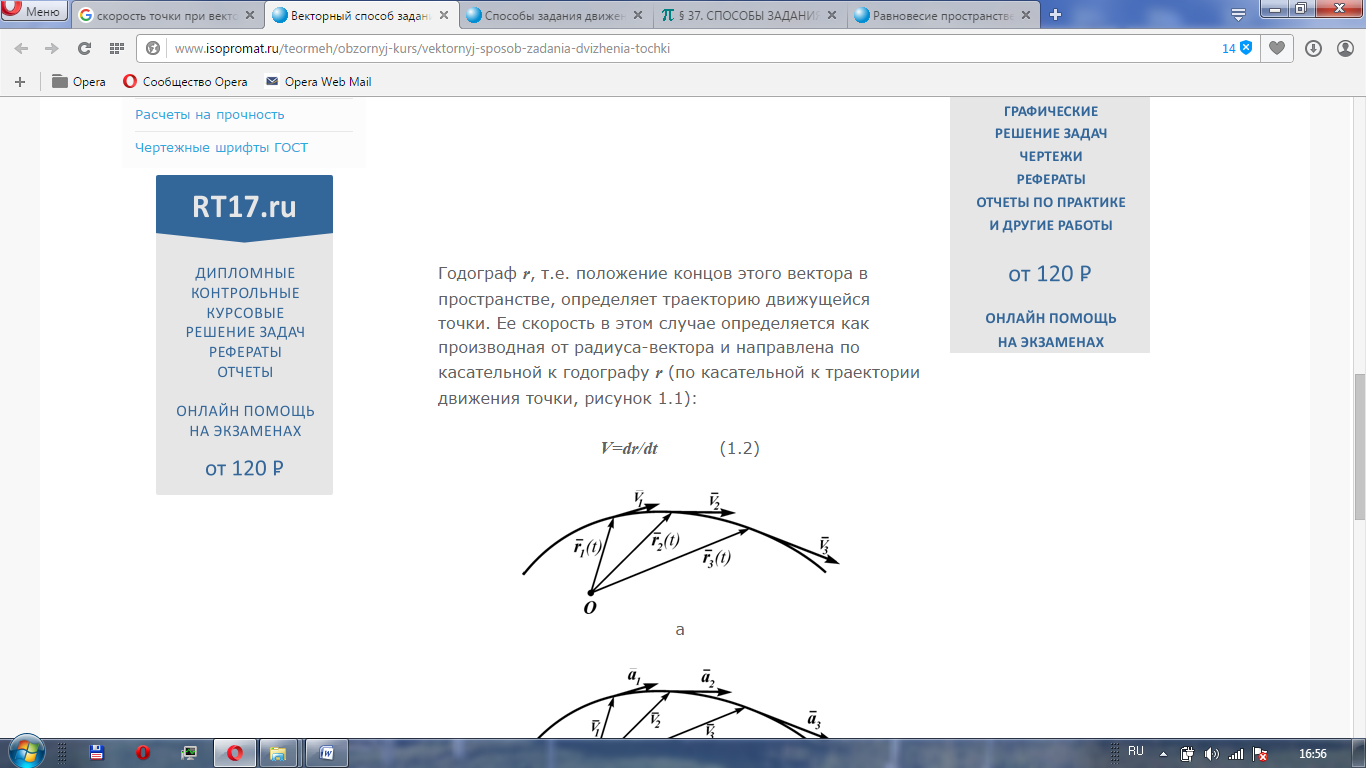
36. Как определяется скорость точки при векторном способе задания её движения? Годограф r, т.е. положение концов этого радиус-вектора в пространстве, определяет траекторию движущейся точки. Ее скорость в этом случае определяется как производная от радиуса-вектора и направлена по касательной к годографу r (по касательной к траектории движения точки
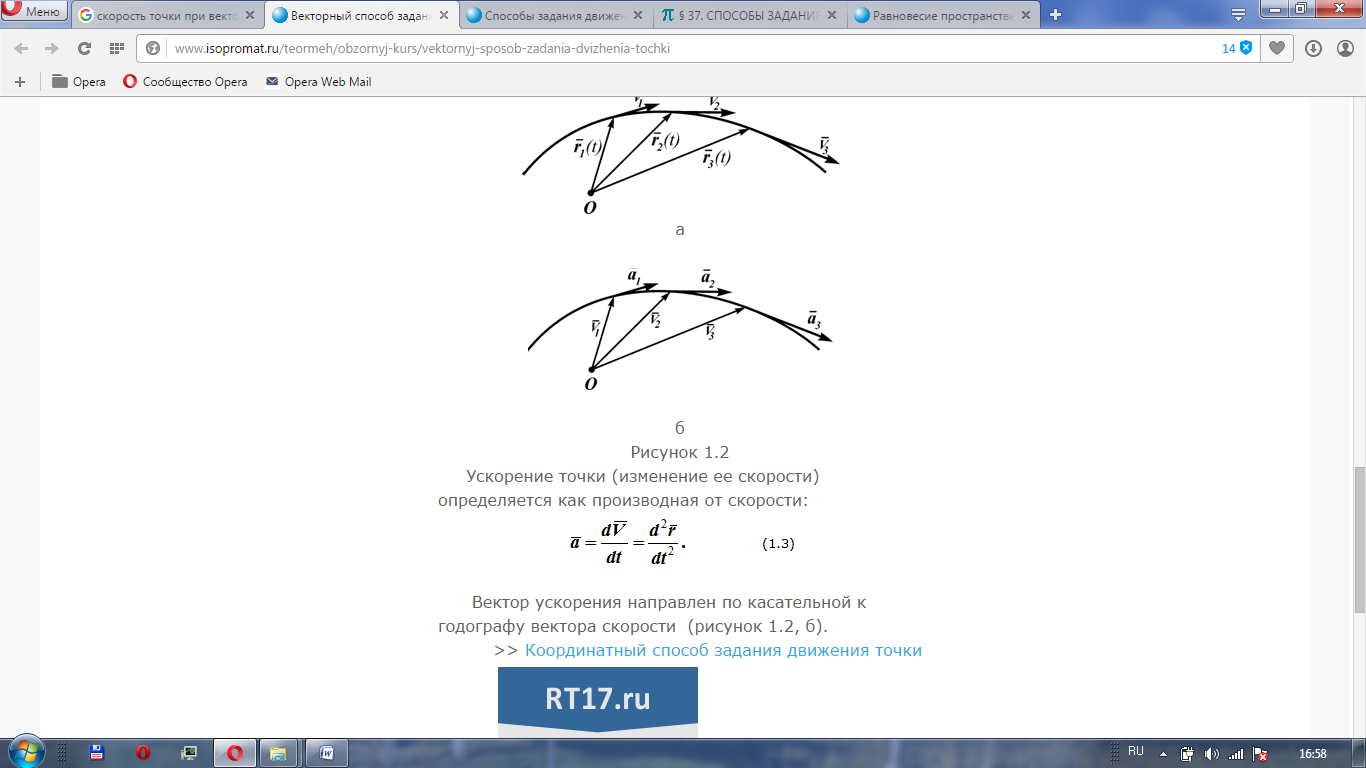
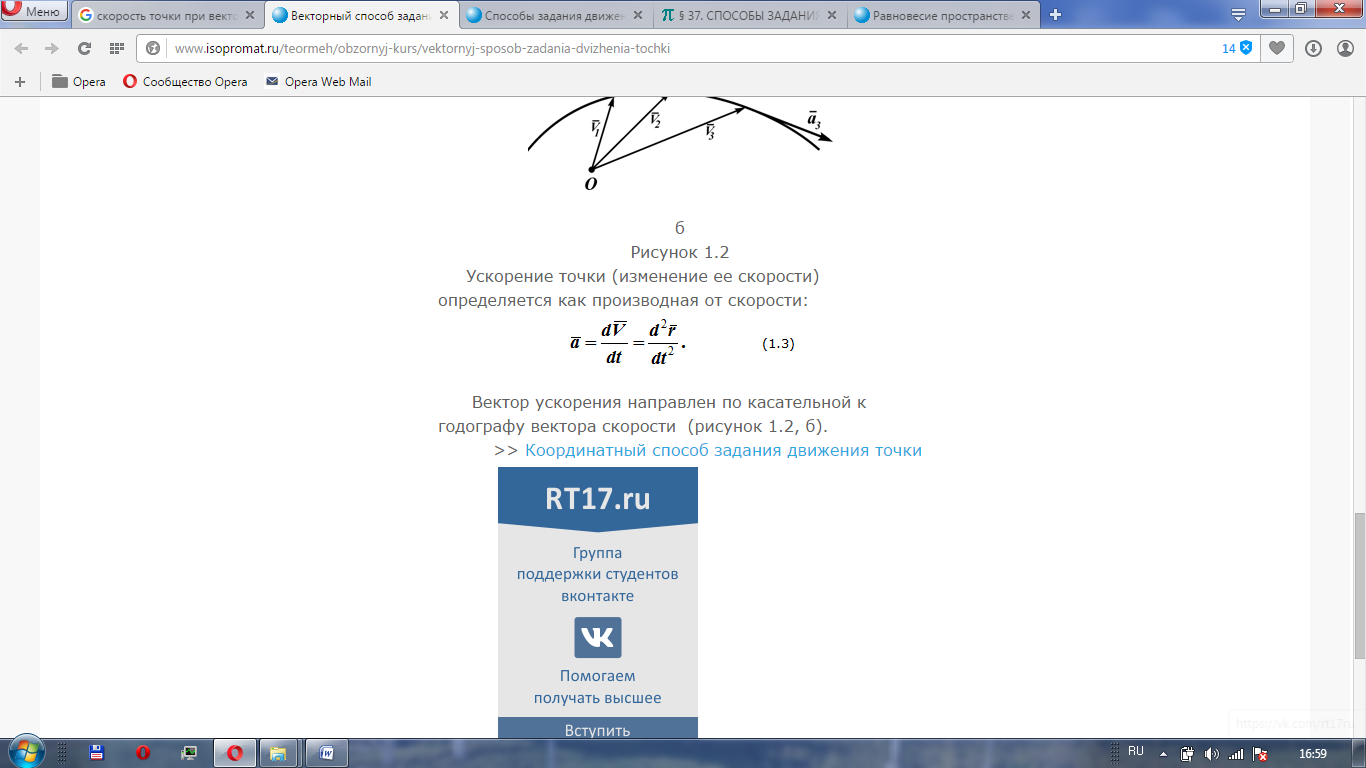
37. Как определяется ускорение точки при векторном способе задания её движения?
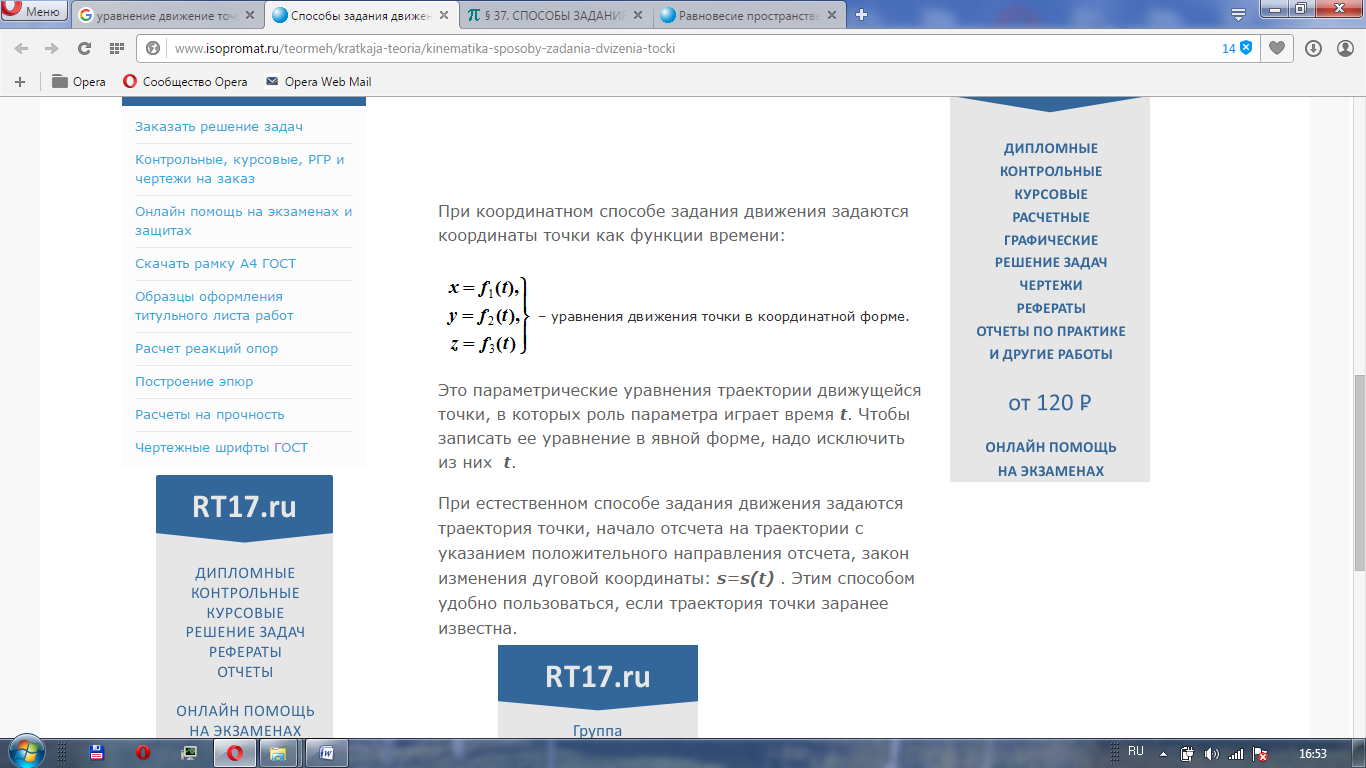
Ускорение точки (изменение ее скорости) определяется как производная от скорости. Вектор ускорения направлен по касательной к годографу вектора скорости. 38. Какими уравнениями определяется движение точки при координатном способе задания сс движения
39. Как определяется скорость точки при координатном способе задания движения?
40. Как определяется ускорение точки при координатном способе задания движения?
41. Каким уравнением определяется движение точки по траектории при естественном способе задания её движения? При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна. 42. Как определяется скорость точки при естественном способе задания её движения?
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-29; просмотров: 1976; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.133.109.211 (0.027 с.) |