
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Динамика полёта. Введение. Задачи курса.Стр 1 из 15Следующая ⇒
Динамика полёта. Введение. Задачи курса. Динамика полёта – это раздел механики изучающий движение Л.А. в различных условиях и средах. Условия: взлёт, посадка, манёвры. Первые работы появились в 1882 году «о парении птиц», Отто Лиленталь 1889г «на планере», первый полёт самолёта на двигателе 17 декабря 1903 года Братья Райт. Пётр Нестеров «мёртвая петля» По мере роста скорости появляется аэродинамичность, аэроавтоупругость. На всех современных Л.А. автоматика в системах управления многократно резервируется. Беспилотная авиация, одно из направлений динамики полёта. Динамика космического полёта. Динамика полёта решает 2 группы задач. 1 группа – Рассматривается связь между внешними силами действующими на Л.А. и траекторией движения, параметрами движения. Прямая задача задача силы параметры движения. Обратная задача, по лётным параметрам определить силы, т.е. облик Л.А. При решении первой группы задач Л.А. рассматривается как тежелая материальная точка. Считается что устойчивость обеспечена, управление идеальное. 2 группа – исследование устойчивости и управления. Л.А. рассматривается как тело Используется не только уравнение сил, но и уравнение моментов. Устойчивость и управление рассматривается для разложения каждой взлёт, посадка, крейсерский. Для разложения масс груза, топлива, центровки. Допущения: в общей постановке решение задач полёта очень сложное, поэтому вводят следующие основные допущения: Л.А. твёрдое тело постоянной массы. Параметры окружающей среды заданы и неизменны. Кривизной и вращением земли пренебрегают.
Уравнения движения самолёта. Движение Л.А.
Кинематические уравнения движения:
Полет в вертикальной плоскости без крена и скольжения При отсутствии ветра траекторная и скоростная система координат совпадают: С учетом этого получаем:
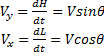
К полученным уравнениям следует добавить кинематические соотношения:
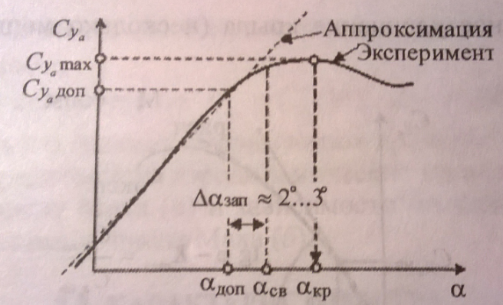
Установившейся полет в вертикальной плоскости Условия: и из (*) => Исходные данные для расчета траекторий (аэродинамические характеристики самолета и характеристики двигателей) А) Зависимость коэффициента подъёмной силы самолета от угла атаки.
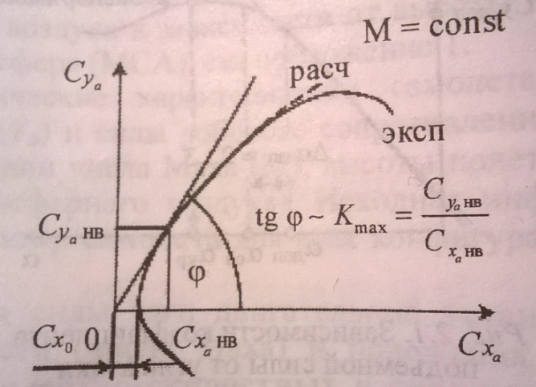
Б) Коэффициент лобового сопротивления самолета в общем случае можно представить в виде: Сx_a=Cx_пр+Сх_i+Cx_в+ΔСх_доп , Где Cx_пр – коэф. профильного сопротивления, возникающего вследствие сил трения и давления; Сх_i – коэф. индуктивного сопротивления (вихри), Cx_в – коэф. волнового сопротивления (вследствие появления скачков уплотнения при М>Mкр); Сх_доп – коэф. дополнительного сопротивления (от местных срывов потоков при α> αкр). На докритических углах атаки удобно пользоваться аналитическим выражением поляры в виде Сx_a=Cx_0+АС2у_а Где Cx_0≈ Cx_пр- коэф. сопротивления ЛА при нулевой подъёмной силе, АС2у_а – коэф. индуктивного сопротивления; А=1/πλэф – коэф. «отвала» поляры. λэф – эффективное удлинение крыла. Поляра самолета
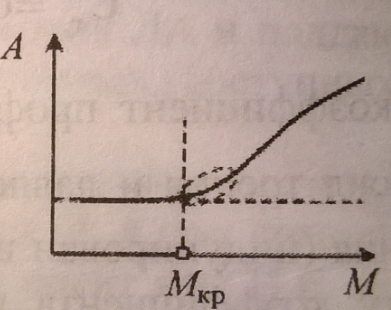
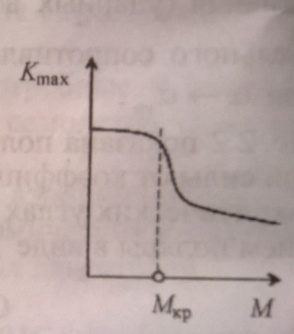
Зависимости параметров поляры от числа Маха
Аэродин. хар-ки самолета
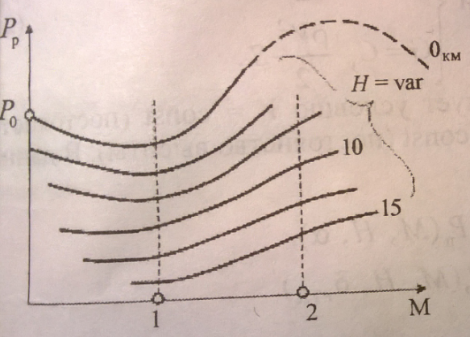
Cx_0 – это с одной стороны функции геом-их параметров самолета, а с другой- функции чисел Маха и Рейнольдса (зависят от конфигурации и высоты полёта). В) Высотно-скоростная характеристика ТРД- это зависимость располагаемой тяги двигателя от высоты и скорости полёта при неизменном режиме работы двигателя, т.е. Pp=f(H,M).
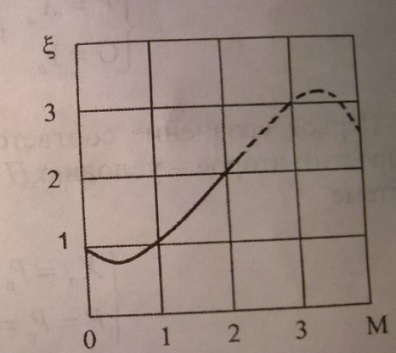
Для оценочных расчётов можно использовать следующие зависимости -для Н<11000 м P(M,H)= ξΔ0.85P0 -для Н>11000 м P(M,H)= 1.2ξΔP0 Здесь P(M,H) – зависимость тяги от числа Маха и высоты; Р0- тяга двигателей на нулевой высоте при нулевой скорости; Δ=ρн/ρ0 – относительная плотность воздуха на высоте Н. Коэф. ξ для ТРД в диапазоне М=1..3,5 задаётся в виде ξ=1-0,32М+0,4М2-0,01М3.
Дальность полёта. Основные понятия. Система уравнений для расчёта дп. Дальность полета. Дальность полета: расстояние по горизонтали, которое пролетит самолет от взлета, до посадки. (Длина проекции траектории на землю) Продолжительность полета: время нахождения самолета в воздухе. Дальность и продолжительность полета зависят от многих факторов. Различают техническую; тактическую дальность итд.
Располагаемый запас топлива: топливо, которое тратится на набор высоты крейсерский полет и снижение. Дальность считают с учетом всего располагаемого топлива – на прогрев – на рулежку, отнимается при этом техническая дальность. АНЗ- аэроновигационный запас топлива(с учетом захода на второй круг или на соседний аэродром). Дальность полета с учетом АНЗ- параметрическая дальность. Радиус действия- наибольшее расстояние, на которое может удалиться самолет с последующим возвращением на аэродром. Полная дальность: складывается из дальности набора, горизонтального полета и снижения. Учет ветра при расчете ДП. При расчете дальности полета, пользуются скоростью самолета относительно воздуха (V), считая скорость ветра W=0. В горизонтальном полете при наличии ветра скорость самолета относительно земной поверхности (Vк=Vп) определяется из уравнения Допустим,
Определение запаса топлива ведется по величине L (путь относительно воздуха). В зависимости от величины и направления скорости ветра величина L, а следовательно, и запас топлива при заданной Радиус ветра Rw при Так, при отсутствии ветра Rw=0 ≈
Способы увеличения ДП. Дозаправка топливом в воздухе используется для того, чтобы: 1) увеличить дальность полета и радиус действия самолета; 2) уменьшить массу самолета при взлете с ограниченных и грунтовых ВПП Дальность полета можно увеличить неограниченно, производя многократные дозаправки. Обычно используются следующие варианты дозаправки: а) одна попутная (при полете к цели); б) одна встречная; в) комбинация попутных и встречных дозаправок. Пример расчета радиуса действия самолета с одной попутной дозаправкой. Задача. Получить Rmax заправляемого самолета. Примем следующие допущения: 1) самолеты (заправщик и заправляемый) – одинаковы; 2) в начале полета вес одинаков у обоих самолетов; 3) самолеты вылетели с одного аэродрома в одно время.
По графику можно определить массу перекачиваемого топлива в зависимости от радиуса конца дозаправки. Для получения Rmax заправляемого самолета необходимо начать дозаправку в момент времени, соответствующий Rнд,чтобы в конце дозаправки заправляемый самолет был заправлен до mполет max, а заправляющий имел ровно столько топлива, сколько необходимо для возвращения на аэродром (с учетом АНЗ – аэронавигационного запаса). Определение радиуса действия заправляемого самолета выполняется графоаналитическим способом в следующем порядке. 1. 2. Находим время дозаправки, зависящее от массы перекачиваемого топлива mпер.топл≈CB и производительности насосов. 3. Вычисляем дальность, соответствующую времени дозаправки:Lдоз=Vдозtдоз.
4. Определяем радиус начала дозаправки: Rнд = Rкд - Lдоз 5. Из точки С строим m=m(R)и определяем Rmax. Если в данном примере взять относительную массу топлива Обычно в качестве заправщиков применяются специальные самолеты. Кроме дозаправки для увеличения дальности используется подвесные топливные баки, сбрасываемые при необходимости после выработки топлива. Достоинства этого способа – автономность самолета, отсутствие сложного и опасного этапа дозаправки, недостатки – увеличение взлетной массы, уменьшение массы полезной нагрузки, увеличение эффективной отражающей поверхности, дополнительное сопротивление
Устойчивость и управляемость. Основные понятия. Об устойчивости Устойчивость – св-во сам. Восстанавливать без вмешательства пилота кин. параметры невозмущенного движ. и возвращаться к исходному режиму полета после прекращения действия возмущ. Современные истребители и авиалайнеры часто делают статически неустойчивыми, т.е. неспособными к постоянному устойчивому полету без вмешательства. Самолет считается статически неустойчивым, если при нарушении равновесия возникающие силы и моменты стремятся увести его еще дальше от положения равновесия. Если же при нарушении равновесия никакие моменты не возникают, то такой ЛА называется статически нейтральным. В случае движения ЛА рассм. не положение равновесия, а некоторое осн. или опорное движ. – это движ. по заданному закону при отсутствии возмущ.(напр. ГП, мертвая петля). В полете всегда действ. возмущ. факторы(атмосферная турбулентность, сброс груза). Под действием возмущ. факторов, движение отклоняется от опорного и называется возмущенным движением. Если с течением времени, возмущ. движ. возвращ. к опорному, то говорят об устойчивости движения самолета. Различают устойчивость в большом и малом. Обычно, рассм. устойчивость к малым возмущ. параметров. Об управляемости Управляемость – св-во сам. реагировать изменениям соответствующих внеш. сил на действия рычагами управления. Для сов. сам. сначала требуется изменить момент внеш. сил для изм. ориентации относ. потока. 1способ – изм. пол. центра давления, отклонив рули. 2способ – изм. пол. центра масс. Набор высоты – новое опорное движ. Если сам. устойчив, то он перейдет к новому опорному движ. без больших запросов параметров за малое время.
Продольный момент крыла
Для профиля момент задается относительно его носка, а для крыла – относительно САХ Для профиля: 1) Симметричный профиль -
2) Для вогнутого
3) S-образный
Аэродинамический фокус профиля расположен ≈ Если М>1, то
Для профиля Если крыло если крыло прямоугольное, плоское, то его Если крыло стреловидное, то Влияние механизации Выпуск механизации добавляет дополнительный Влияние фюзеляжа Влияние фюзеляжа сводится к смещению фокуса без ГО вперед И учитываются поправками Аналогично поправками учитываются влияния мотогондол, подвесок, шасси и т.д. Аэродинамический фокус — точка приложения вектора прироста подъёмной силы, вызванного изменением угла атаки. Аэродинамический фокус самолета (
Правило продольного V При уст-ся полете должно выполняться 1) 2)
Для того чтобы
Усилия управления Усилие на командном рычаге управления может быть выражено через шарнирный момент на руле: Pкр = Кш· mш · Sр · bр · q, где Кш = Коэффициент шарнирного момента при малых углах отклонения руля линейно зависит от величины этого угла. Отсюда следует, что в полете усилие на командном рычаге прямо пропорционально углу отклонения руля и величине скоростного напора. Балансировочные усилия управления действуют в длительном установившемся режиме полета и обеспечивают уравновешивание (балансировку) самолета на этом режиме. Такие усилия лишь утомляют летчика и поэтому от них желательно избавиться.
57.
58.
ШТОПОР
Неустойчивый – это штопор с переменными по величине и направлению угловыми скоростями. Исследования показали, что в основе штопора лежит самопроизвольное вращение крыльев самолета при наличии большого начального угла атаки и что для прекращения штопора необходимо торможение вращения и резкое уменьшение угла атаки. Выход ЛА из штопора состоит из трех этапов: - прекращение самовращения самолета – перевод на докритические углы атаки; - пикирование на докритических углах атаки с целью увеличения скорости полета; - вывод самолета из пикирования и перевод его в режим прямолинейного горизонтального полета. Динамика полёта. Введение. Задачи курса. Динамика полёта – это раздел механики изучающий движение Л.А. в различных условиях и средах. Условия: взлёт, посадка, манёвры. Первые работы появились в 1882 году «о парении птиц», Отто Лиленталь 1889г «на планере», первый полёт самолёта на двигателе 17 декабря 1903 года Братья Райт. Пётр Нестеров «мёртвая петля» По мере роста скорости появляется аэродинамичность, аэроавтоупругость. На всех современных Л.А. автоматика в системах управления многократно резервируется. Беспилотная авиация, одно из направлений динамики полёта. Динамика космического полёта. Динамика полёта решает 2 группы задач. 1 группа – Рассматривается связь между внешними силами действующими на Л.А. и траекторией движения, параметрами движения. Прямая задача задача силы параметры движения. Обратная задача, по лётным параметрам определить силы, т.е. облик Л.А. При решении первой группы задач Л.А. рассматривается как тежелая материальная точка. Считается что устойчивость обеспечена, управление идеальное. 2 группа – исследование устойчивости и управления. Л.А. рассматривается как тело Используется не только уравнение сил, но и уравнение моментов. Устойчивость и управление рассматривается для разложения каждой взлёт, посадка, крейсерский. Для разложения масс груза, топлива, центровки. Допущения: в общей постановке решение задач полёта очень сложное, поэтому вводят следующие основные допущения: Л.А. твёрдое тело постоянной массы. Параметры окружающей среды заданы и неизменны. Кривизной и вращением земли пренебрегают.
|
|||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 943; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.16.66.206 (0.097 с.) |
 (1)
(1) (2)
(2) - момент количества движения относительно центра масс.
- момент количества движения относительно центра масс.

 (3)
(3)



 – эйлеровы узлы определяющие угловую ориентацию.Для решения задач векторные уравнения расписываются на оси. От выбора системы координат зависит сложность уравнений.
– эйлеровы узлы определяющие угловую ориентацию.Для решения задач векторные уравнения расписываются на оси. От выбора системы координат зависит сложность уравнений. .
. =>
=>  если углы
если углы 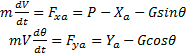 (*).
(*).
 , то:
, то: .
.


 .
. Тогда за время полета tпол из пункта А в пункт В самолет пройдет относительно Земли LAB=Lзем =Vпtпол. (см рисунок);
Тогда за время полета tпол из пункта А в пункт В самолет пройдет относительно Земли LAB=Lзем =Vпtпол. (см рисунок);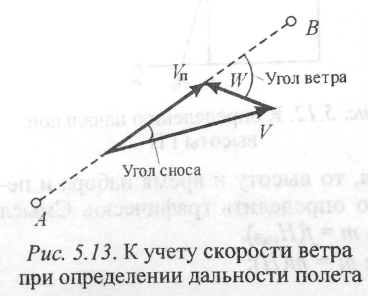 относительно воздуха L=Vtпол , откуда
относительно воздуха L=Vtпол , откуда  .
. могут быть больше или меньше, чем при отсутствии ветра.
могут быть больше или меньше, чем при отсутствии ветра. =const всегда меньше, чем в безветрие.
=const всегда меньше, чем в безветрие. , а если направление ветра, например, параллельно направлению полета и
, а если направление ветра, например, параллельно направлению полета и  , то
, то где
где  и тогда
и тогда  Rw=0
Rw=0  .
. Рассмотрим предварительно зависимость m=m(R) (см рисунок)
Рассмотрим предварительно зависимость m=m(R) (см рисунок)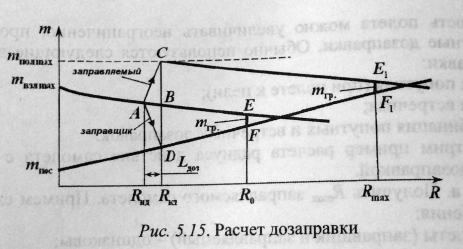 Определяем радиус конца дозаправки Rк доз из условия CB=BD (см рис)
Определяем радиус конца дозаправки Rк доз из условия CB=BD (см рис) , а относительную массу груза
, а относительную массу груза  , то радиус действия заправленного самолета увеличится примерно в 1,33 раза.
, то радиус действия заправленного самолета увеличится примерно в 1,33 раза.
 – линейная на докритических углах атаки
– линейная на докритических углах атаки
 – производная по
– производная по 






 для тонкого профиля не зависит от его формы и равен
для тонкого профиля не зависит от его формы и равен 
 хорды при М<<1
хорды при М<<1 ;
; 




 определяется профилем
определяется профилем


 ) не зависит от формы профиля, крыла и ГО, а зависит от вида самолета в плане
) не зависит от формы профиля, крыла и ГО, а зависит от вида самолета в плане
 – самолет статич. уст
– самолет статич. уст - ближе к хвосту
- ближе к хвосту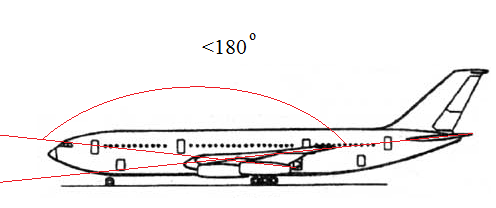

 - момент при нулевой подъемной силе
- момент при нулевой подъемной силе , у стат. уст. ЛА угол между хордами крыла и ГО должен быть меньше 180о
, у стат. уст. ЛА угол между хордами крыла и ГО должен быть меньше 180о рmax/xрmax - коэффициент передачи от командного рычага к рулю,
рmax/xрmax - коэффициент передачи от командного рычага к рулю, 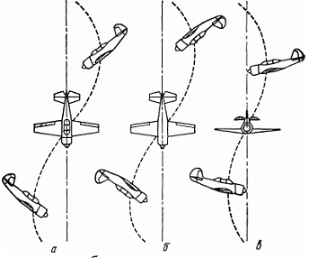 Штопор самолета – это такое характерное его движение на закритических углах атаки, когда он быстро теряет высоту, одновременно вращаясь вокруг осей ОХ и ОУ. Траектория движения центра масс при штопоре представляет собой сильно вытянутую спираль. Сваливание самолета еще не означает однозначного попадания ЛА в штопор. Если пилот, энергично отклоняя руль высоты, опустит нос самолета и тем самым уменьшит угол атаки при одновременном увеличении скорости, то ЛА выйдет на режим снижения и пилоту будет нетрудно вернуться к горизонтальному полету. Самолет входит в штопор только в том случае, если не удалось избежать выхода на режим самовращенияю.Различают штопор устойчивый и неустойчивый. Устойчивым называется штопор, в процессе которого самолет не изменяет направления вращения, хотя величины угловых скоростей могут быть переменными.
Штопор самолета – это такое характерное его движение на закритических углах атаки, когда он быстро теряет высоту, одновременно вращаясь вокруг осей ОХ и ОУ. Траектория движения центра масс при штопоре представляет собой сильно вытянутую спираль. Сваливание самолета еще не означает однозначного попадания ЛА в штопор. Если пилот, энергично отклоняя руль высоты, опустит нос самолета и тем самым уменьшит угол атаки при одновременном увеличении скорости, то ЛА выйдет на режим снижения и пилоту будет нетрудно вернуться к горизонтальному полету. Самолет входит в штопор только в том случае, если не удалось избежать выхода на режим самовращенияю.Различают штопор устойчивый и неустойчивый. Устойчивым называется штопор, в процессе которого самолет не изменяет направления вращения, хотя величины угловых скоростей могут быть переменными.


