
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Построение диаграмм движения выходного звенаСтр 1 из 4Следующая ⇒
Введение
В механизмах привода поперечно строгальных станков используется механизм, обеспечивающий главное возвратно-поступательное движение резания. Основная масса механизмов использующихся в данных станках это кулисные механизмы. Они обеспечивают заданную скорость рабочего хода и повышенную скорость холостого хода. Расчёт и проектирование данных механизмов является важным этапом в образовании инженера. В курсе предмета «Теория машин, механизмов и манипуляторов» получаются навыки расчёта механизмов машин. Комплексным подходом к закреплению полученных знаний является выполнение курсового проекта по данному курсу. В курсовом проекте осуществляется синтез и расчёт кулисного механизма, построение и расчёт зубчатого зацепления и кулачкового механизма. При выполнении работы используются все знания, полученные за курс предмета.
1 Синтез и анализ рычажного механизма
Исходные данные: Схема механизма
ход ползуна, Н = 400мм; коэффициент производительности, К = 1,4; межосевое расстояние, О1О2 = 300мм; частота вращения кривошипа, nкр= 100мин —1.
1.1 Структурный анализ механизма.
Механизм состоит из пяти подвижных звеньев: кривошипа 1, кулисного камня 2, кулисы 3, ползуна 4, ползуна 5 и неподвижной стойки 0. Все звенья, соединяясь между собой, образуют семь одноподвижных кинематических пар, из них 4 вращательные в точках О1, О2, А, В3 и три поступательных − в точках А3, В5, С. По формуле Чебышева определяем степень подвижности механизма: W=З×К − 2×Р1 − P2;
Р1 = 7 − число одноподвижных кинематических пар; Р2 = 0 − число двухподвижных кинематических пар. К начальному звену 1 и стойке 0 последовательно присоединены две группы Ассура: (2,3) − второго класса, второго порядка, третьего вида и (4,5) − второго класса, второго порядка, пятого вида. Разлагаем механизм на механизм I класса и структурные группы (рисунок 1.2).
Рисунок 1.2 – Разбиение на диады
Записываем формулу строения механизма и определяем его класс и порядок: (0,1) I → (2,3) II,2 → (4,5) II,2. По классификации И.И. Артоболевского механизм является механизмом второго класса, второго порядка.
1.2 Определение недостающих размеров и построение планов механизма
По заданному значению коэффициента производительности К определим угол качания кулисы 3:
Из треугольника О1А0О2 очевидно, что:
Из рис.1.1.очевидно,что B0B7 / = Н = 400мм. Из треугольника B0О2B7/:
Выбираем масштабный коэффициент построений КL=0,002 м/мм и строим два крайних положения кулисы 3. Из условия φр ≥ 1800 и сообразуясь с заданным направлением вращения кривошипа определяем начальное крайнее положение механизма и методом засечек строим 12 планов положений всех звеньев. Длины звеньев в выбранном масштабе:
1.3 Построение планов скоростей
Определяем угловую скорость кривошипа по формуле:
где nкр − частота вращения кривошипа, мин-1.
Определяем линейную скорость точки А − конца кривошипа по формуле:
где Выбираем масштабный коэффициент плана скоростей:
где VA − линейная скорость точки А, м/с;
Из полюса Для определения скорости внутренней точки А/ диады II (2-3) составляем систему двух векторных уравнений, выражая скорость точки А/ через известные скорости внешних точек А и О2 (
где
Решаем систему уравнений графически и определяем скорость точки А/ по величине:
Для третьего положения механизма имеем:
Скорость точки В определяем по свойству подобия:
Для третьего положения механизма имеем:
Для определения скорости внутренней точки В/ диады II (4−5) составляем систему двух векторных уравнений, выражая скорость точки через известные скорости внешних точек В и С (VС = 0 м/с):
где
Решаем систему векторных уравнений графически и определяем скорость точки B/:
Для третьего положения механизма имеем:
Конец вектора
Значения скоростей точек в остальных положениях запишем в табл. 1.1. Таблица 1.1 − Значения скоростей точек механизма
1.4 Построение планов ускорений
Определяем ускорения точки А на кривошипе при условии, что ω1 = const:
aА = 10,47²*0,078=8,51м/с² Выбираем масштабный коэффициент плана ускорений Ка:
где aА - ускорение точки А, м/с2;
Пересчётный коэффициент:
Из полюса Для определения ускорения внутренней точки А/ диады II (2-3) составляем систему двух векторных уравнений, выражая неизвестное ускорение точки А/ через известные ускорения внешних точек А и О2 (
где
Расчёт кориолисового и нормального ускорений:
Направление Кориолисова ускорения определяется поворотом на 900 вектора относительной скорости Вектора кориолисового и нормального ускорений на плане ускорений:
Значения ускорений точки
Ускорение точки кулисы В определяем по свойству подобия:
Для определения ускорения внутренней точки В/ диады II (4−5) составляем систему двух векторных уравнений её движения, выражая ускорение точки В/ через известные ускорения внешних точек диады В и С (аС = 0 м/с2):
где
Решаем систему векторных уравнений графически и определяем ускорение точки В/:
Для третьего положения механизма имеем:
Конец вектора Значения ускорений в оставшихся положениях механизма запишем в табл. 1.2. Таблица 1.2 - Значения ускорений.
Аналитический метод расчёта
Положение точки А определяется уравнениями:
Угол размаха кулисы можно определить по уравнению:
Скорость точки А1, принадлежащей кривошипу 1 равна:
Расстояние AB:
Угловая скорость кулисы:
Продифференцируем уравнение по времени:
Расчёт скоростей и ускорений на ЭВМ Sub Kulis () Const H = 0.430 Const L0 = 0.16 Const L1 =0.092 Const a = 0.27 Const Wl = 10,67 i = 2 For fl = 18 * 3.14 / 180 To 378 * 3.14 /180 Step 30 * 3.14 /180 Cosf3 = L1 * cos(fl)/ (((LI ^ 2 + L0 * LI * sin(fl)) ^ (1 / 2)) U31 = (cosf3 ^ 2) * (LI ^ 2 + L0 * LI * sin(fl)) /(LI ^ 2 * (cos(fl)^ 2)) T = (LI ^ 2) + L0 * LI * sin(fl) Q = (LI ^ 2) + (L0 ^ 2) + 2 * L0 * LI * sin(fl) w3 = Wl * (T / Q) up31=(L0*LI*cos(fl)*(L0^2 - LI^2)) /(((L0^2) - (LI^2) + 2*L0*LI*sin(fl))^2) e3=(Wl ^2)*up31 sinf3 = (L0 + LI * sin(fl)) / ((LO ^ 2 + LI ^ 2 +2*LO*L1 * sin(fl)) ^ (1 / 2)) u53=(a/(sinf3^2)) vb = w3 * u53 Worksheets(1).Cells(3, I + 1).Value = CDbl(Format(vb, "Fixed")) Up53 = (2 *a * cosf3) / (sinf3 ^ 3) Ab =(w3 ^ 2) * up53 + e3 * u53 Worksheets(l).Cells(8,1 + 1).Value = CDbl(Forrnat(ab, "Fixed")) Worksheets(l).Cells(2, i). Value -1 - 2 Worksheets(l).Cells(7, i). Value = 1-2 I = I + 1 Next fl Worksheets(l).Cells(2, l). Value = "Vb,м/c" Worksheets(l).Cells(3, 1). Value = "Аналитические" Worksheets(l).Cells(4, 1). Value = "Графические" Worksheets(l).Cells(7, l). Value = "ab,м/c" Worksheets(l).Cells(8, 1). Value = " Аналитические " Worksheets(l).Cells(9, l). Value = "Графические" Worksheets(l).Cells(l, 1). Value = "Taблица1" Worksheets(l).Cells(l, 5). Value - "Значения скоростей Vb, м/с" Worksheets(l).Cells(6, l). Value = "Taблица 2" Worksheets(l).Cells(6, 5).Value = "Значения ускорений ab, м/с2" End Sub Таблица 1.3 – Значения скоростей
Таблица 1.4 – Значения ускорений
Диаграммы скоростей и ускорений:
Рисунок 1.4 – Диаграмма скоростей
Рисунок 1.5 – Диаграмма ускорений
Определение сил инерции. Определяем силы инерции звеньев механизма:
Cилу инерции О2К = Определяем силы тяжести звеньев: G3 = m3 × g = 20*9,8=196 Н G5 = m5 × g = 50*9,8=490,0Н
2.2. Расчет диады II (4−5).
Изображаем диаду со всеми приложенными к ней силами. Действие отброшенных звеньев заменяем реакциями связей Из условия равновесия ползуна 4:
Составляем условие равновесия диады II (4,5): ∑
Уравнение содержит две неизвестные величины реакций R50, R43 и решается графически. Строим план сил на основе уравнения равновесия. Для построения плана выбираем масштаб сил Кр:
Из плана сил имеем:
Расчет диады II (2-3). Следующей изображаем диаду II (2-3) со всеми приложенными к ней силами (см. граф. часть). Действие отброшенных звеньев заменяем действием реакций связей R21 и R30, которые требуется определить. Действие отброшенного звена 4 на третье звено известно: реакция R34 равна по величине и противоположно направлена реакции R43, которая уже определена из плана сил диады II (4-5). Составляем условие равновесия диады II (2-3): ∑
Анализируем уравнение. Оно содержит три неизвестных: модуль реакции R21, модуль и направление реакции R30. Значит, графически оно не решается. Из условия равновесия камня 2: Реакцию R21 определим аналитически из уравнения моментов сил относительно точки О2:
=3133 Н Теперь уравнение равновесия содержит два неизвестных, следовательно, графически оно решается. Строим план сил диады II (2-3) по уравнению её равновесия. Масштаб сил Кр = 10 Н/мм. Из плана сил имеем:
Внутреннюю реакцию R23 находим из условия равновесия кулисного камня 2:
R23 = R21 =3133 Н. Расчет кривошипа Силовой расчет кривошипа состоит в поиске реакции стойки на кривошип ∑
Реакцию стойки на звено 1 определим из условия равновесия кривошипа: ∑
По уравнению равновесия строим план сил. Масштаб сил Кр =20 Н/мм. Из плана сил имеем:
Определение мощностей. Определяем потери мощности на трение в кинематических парах. Мощность от силы трения в поступательных парах:
Мощность со вращательных парах:
где f =0,1- коэффициент трения; f / = (1,2…1,5)f - приведенный коэффициент трения; R - реакция в кинематической паре, Н; rЦ - радиус цапфы кинематической пары, м. N23 = N45 = N50 = N10 = f / ×R10 × rц × w1 =0,12*650*0,02*10,47=16,3 Вт N12 = f / ×R12 × rц × w12 =0,12*3133*0,02*8,33=62,6 Вт N30 = f / ×R30 × rц × w3 =0,12*1570*0,02*2,14=8,1 Вт N34 = f / ×R34 × rц × w3 =0,12*1530*0,02*2,14=7,9 Вт
Суммарная мощность трения: Nтр=åNi=N23+N45+N50+N10+N12+N30+N34= =52,3+10,7+80,9+16,3+62,6+8,1+7,9=238,8 Вт Мощность привода, затрачиваемая на преодоление полезной нагрузки: NQ = Q × Мгновенная потребная мощность двигателя: N = NРу + NТР;
N = 2472,9+238,8=2711,7 Вт Построение профиля кулачка
В масштабе Из центра
Список использованной литературы.
1. Артоболевский И. И. Теория механизмов и машин. Москва. Наука, - 1988. – 640 с. 2. А. С. Кореняко и др. Курсовое: проектирование по теории механизмов и машин. - Киев “Вища школа”. - 1970. - 332с. 3. Курсовое проектирование по теории механизмов и машин. Под общей редакцией Г. Н. Девойно. Минск “Вышэйшая школа”, - 1986. – 286 с. 4. Теория механизмов и машин. Под редакцией К. З. Фролова. Москва. Высшая школа, - 1970. – 412 с. 5. А. А. Машков. Теория механизмов и машин. Минск “Вышэйшая школа”. - 1971. – 47
Введение
В механизмах привода поперечно строгальных станков используется механизм, обеспечивающий главное возвратно-поступательное движение резания. Основная масса механизмов использующихся в данных станках это кулисные механизмы. Они обеспечивают заданную скорость рабочего хода и повышенную скорость холостого хода. Расчёт и проектирование данных механизмов является важным этапом в образовании инженера. В курсе предмета «Теория машин, механизмов и манипуляторов» получаются навыки расчёта механизмов машин. Комплексным подходом к закреплению полученных знаний является выполнение курсового проекта по данному курсу. В курсовом проекте осуществляется синтез и расчёт кулисного механизма, построение и расчёт зубчатого зацепления и кулачкового механизма. При выполнении работы используются все знания, полученные за курс предмета.
1 Синтез и анализ рычажного механизма
Исходные данные: Схема механизма
ход ползуна, Н = 400мм; коэффициент производительности, К = 1,4; межосевое расстояние, О1О2 = 300мм; частота вращения кривошипа, nкр= 100мин —1.
1.1 Структурный анализ механизма.
Механизм состоит из пяти подвижных звеньев: кривошипа 1, кулисного камня 2, кулисы 3, ползуна 4, ползуна 5 и неподвижной стойки 0. Все звенья, соединяясь между собой, образуют семь одноподвижных кинематических пар, из них 4 вращательные в точках О1, О2, А, В3 и три поступательных − в точках А3, В5, С. По формуле Чебышева определяем степень подвижности механизма: W=З×К − 2×Р1 − P2;
Р1 = 7 − число одноподвижных кинематических пар; Р2 = 0 − число двухподвижных кинематических пар. К начальному звену 1 и стойке 0 последовательно присоединены две группы Ассура: (2,3) − второго класса, второго порядка, третьего вида и (4,5) − второго класса, второго порядка, пятого вида. Разлагаем механизм на механизм I класса и структурные группы (рисунок 1.2).
Рисунок 1.2 – Разбиение на диады
Записываем формулу строения механизма и определяем его класс и порядок: (0,1) I → (2,3) II,2 → (4,5) II,2. По классификации И.И. Артоболевского механизм является механизмом второго класса, второго порядка.
1.2 Определение недостающих размеров и построение планов механизма
По заданному значению коэффициента производительности К определим угол качания кулисы 3:
Из треугольника О1А0О2 очевидно, что:
Из рис.1.1.очевидно,что B0B7 / = Н = 400мм. Из треугольника B0О2B7/:
Выбираем масштабный коэффициент построений КL=0,002 м/мм и строим два крайних положения кулисы 3. Из условия φр ≥ 1800 и сообразуясь с заданным направлением вращения кривошипа определяем начальное крайнее положение механизма и методом засечек строим 12 планов положений всех звеньев. Длины звеньев в выбранном масштабе:
1.3 Построение планов скоростей
Определяем угловую скорость кривошипа по формуле:
где nкр − частота вращения кривошипа, мин-1.
Определяем линейную скорость точки А − конца кривошипа по формуле:
где Выбираем масштабный коэффициент плана скоростей:
где VA − линейная скорость точки А, м/с;
Из полюса Для определения скорости внутренней точки А/ диады II (2-3) составляем систему двух векторных уравнений, выражая скорость точки А/ через известные скорости внешних точек А и О2 (
где
Решаем систему уравнений графически и определяем скорость точки А/ по величине:
Для третьего положения механизма имеем:
Скорость точки В определяем по свойству подобия:
Для третьего положения механизма имеем:
Для определения скорости внутренней точки В/ диады II (4−5) составляем систему двух векторных уравнений, выражая скорость точки через известные скорости внешних точек В и С (VС = 0 м/с):
где
Решаем систему векторных уравнений графически и определяем скорость точки B/:
Для третьего положения механизма имеем:
Конец вектора
Значения скоростей точек в остальных положениях запишем в табл. 1.1. Таблица 1.1 − Значения скоростей точек механизма
1.4 Построение планов ускорений
Определяем ускорения точки А на кривошипе при условии, что ω1 = const:
aА = 10,47²*0,078=8,51м/с² Выбираем масштабный коэффициент плана ускорений Ка:
где aА - ускорение точки А, м/с2;
Пересчётный коэффициент:
Из полюса Для определения ускорения внутренней точки А/ диады II (2-3) составляем систему двух векторных уравнений, выражая неизвестное ускорение точки А/ через известные ускорения внешних точек А и О2 (
где
Расчёт кориолисового и нормального ускорений:
Направление Кориолисова ускорения определяется поворотом на 900 вектора относительной скорости Вектора кориолисового и нормального ускорений на плане ускорений:
Значения ускорений точки
Ускорение точки кулисы В определяем по свойству подобия:
Для определения ускорения внутренней точки В/ диады II (4−5) составляем систему двух векторных уравнений её движения, выражая ускорение точки В/ через известные ускорения внешних точек диады В и С (аС = 0 м/с2):
где
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-19; просмотров: 178; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.143.244.83 (0.285 с.) |
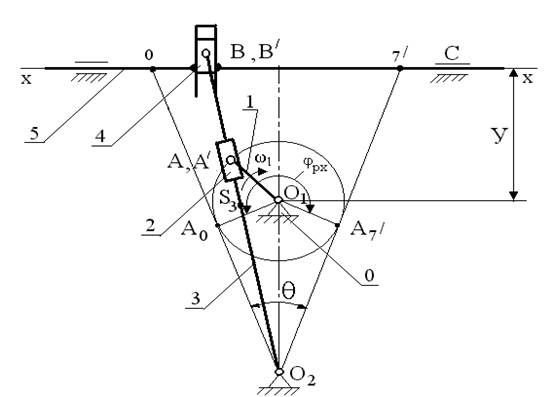 Рисунок 1.1 – План механизма
Рисунок 1.1 – План механизма



 30º
30º 0,3*sin30º/2=0,078 м.
0,3*sin30º/2=0,078 м. 0,4/2*sin(30/2)=0,773 м
0,4/2*sin(30/2)=0,773 м (0,773*cos(30º/2)+0,773)/2-0,3=0,46 м
(0,773*cos(30º/2)+0,773)/2-0,3=0,46 м 0,078/0,002=39мм
0,078/0,002=39мм 0,3/0,002=150мм
0,3/0,002=150мм 0,773/0,002=386,5мм
0,773/0,002=386,5мм 0,46/0,002=230мм
0,46/0,002=230мм
 10,47 с ¹
10,47 с ¹ 10,47*0,078=0,81м/с
10,47*0,078=0,81м/с − длина кривошипа, м.
− длина кривошипа, м. 0,81/81=0,01м/c*мм
0,81/81=0,01м/c*мм а – отрезок, изображающий скорость точки А на плане скоростей, мм.
а – отрезок, изображающий скорость точки А на плане скоростей, мм. = 0 м/с):
= 0 м/с):
 - относительная скорость точки А/ кулисы 3 в поступательном движении относительно точки А на камне 2;
- относительная скорость точки А/ кулисы 3 в поступательном движении относительно точки А на камне 2; - скорость точки А/ во вращательном движении относительно центра вращения О2.
- скорость точки А/ во вращательном движении относительно центра вращения О2.
 80*0,01=0,8м/с
80*0,01=0,8м/с


 165*0,01=1,65м/с
165*0,01=1,65м/с
 – относительная поступательная скорость точки B/ относительно точки B;
– относительная поступательная скорость точки B/ относительно точки B; − относительная поступательная скорость точки B/ относительно точки С.
− относительная поступательная скорость точки B/ относительно точки С. =
=  × KV;
× KV; , определяющий скорость центра тяжести кулисы 3, расположен в соответствии с теоремой подобия на середине отрезка
, определяющий скорость центра тяжести кулисы 3, расположен в соответствии с теоремой подобия на середине отрезка  плана скоростей.
плана скоростей.

 a -отрезок, изображающий ускорение aА точки А на плане ускорений, мм.
a -отрезок, изображающий ускорение aА точки А на плане ускорений, мм. =0,1м / с²*мм
=0,1м / с²*мм
 по направлению от точки А к центру вращения О1 отрезком
по направлению от точки А к центру вращения О1 отрезком  = 0м/с2):
= 0м/с2):
 - ускорение Кориолиса, между точками А/ и А, лежащими на разных звеньях, которые обладают общей угловой скоростью и движутся относительно друг друга;
- ускорение Кориолиса, между точками А/ и А, лежащими на разных звеньях, которые обладают общей угловой скоростью и движутся относительно друг друга; - относительное касательное ускорение в поступательном движении внутренней точки диады А/ относительно внешней точки А.
- относительное касательное ускорение в поступательном движении внутренней точки диады А/ относительно внешней точки А. - относительное нормальное ускорение точки А/ во вращательном движении относительно точки О2;
- относительное нормальное ускорение точки А/ во вращательном движении относительно точки О2; - относительное касательное ускорение точки А/ во вращательном движении относительно точки О2;
- относительное касательное ускорение точки А/ во вращательном движении относительно точки О2;
 в сторону вращения кулисы.
в сторону вращения кулисы.

 на плане ускорений:
на плане ускорений:




 - полное относительное ускорение точки В/ относительно точки В;
- полное относительное ускорение точки В/ относительно точки В; – полное относительное ускорение точки В/ относительно точки С.
– полное относительное ускорение точки В/ относительно точки С.
 = 26*0,1=2,6м/с²
= 26*0,1=2,6м/с² , определяющий ускорение центра тяжести кулисы 3, расположен в соответствии с теоремой подобия на середине отрезка
, определяющий ускорение центра тяжести кулисы 3, расположен в соответствии с теоремой подобия на середине отрезка  плана ускорений.
плана ускорений. Кулисный механизм состоит из звеньев: кривошипа 1, кулисного камня 2, кулисы 3 и стойки.
Кулисный механизм состоит из звеньев: кривошипа 1, кулисного камня 2, кулисы 3 и стойки.





 Скорость точки А3, принадлежащей кулисе 3 равна:
Скорость точки А3, принадлежащей кулисе 3 равна:

 (5)
(5)








 -20*2,15=-43 Н
-20*2,15=-43 Н -50*2,6=-130 Н
-50*2,6=-130 Н прикладываем в точке К:
прикладываем в точке К: 2/3*386=257,3 мм
2/3*386=257,3 мм и
и  , которые подлежат определению.
, которые подлежат определению.


 1400/140=10 Н/мм
1400/140=10 Н/мм 49*10=490 Н
49*10=490 Н 153*10=1530 Н
153*10=1530 Н

 Реакция кулисы на камень R23 направлена перпендикулярно линии движения камня по кулисе. Реакция R21 приложена в центре шарнира А. Из условия равновесия камня следует, что сила R21 направлена перпендикулярно кулисе, а реакция R23 проходит через центр шарнира А.
Реакция кулисы на камень R23 направлена перпендикулярно линии движения камня по кулисе. Реакция R21 приложена в центре шарнира А. Из условия равновесия камня следует, что сила R21 направлена перпендикулярно кулисе, а реакция R23 проходит через центр шарнира А.

 (15300*378+143*131+196*10)/187=
(15300*378+143*131+196*10)/187= 157*10=1570 Н
157*10=1570 Н

 и уравновешивающей силы
и уравновешивающей силы  , имитирующей действие силы со стороны двигателя на кривошип. Реакция R12 известна, так как
, имитирующей действие силы со стороны двигателя на кривошип. Реакция R12 известна, так как  . Величину Ру определим из уравнения моментов сил относительно точки О1 кривошипа:
. Величину Ру определим из уравнения моментов сил относительно точки О1 кривошипа:

 (3133*38)/39=3153 Н
(3133*38)/39=3153 Н


 32,5*20=650 Н
32,5*20=650 Н

 0,1*3133*0,17=53,3 Н
0,1*3133*0,17=53,3 Н 0,1*1530*0,07=10,7 Вт
0,1*1530*0,07=10,7 Вт 0,1*490*1,65=80,9 Вт
0,1*490*1,65=80,9 Вт 3053*0,81=2472,9 Вт
3053*0,81=2472,9 Вт из центра
из центра  строю две окружности: минимального радиуса
строю две окружности: минимального радиуса  = 83,5 мм и радиусом
= 83,5 мм и радиусом  =122,2 мм (расстояние между осями вращения кулачка и колебателя). От точки А на окружности радиуса
=122,2 мм (расстояние между осями вращения кулачка и колебателя). От точки А на окружности радиуса  и делю его на несколько равных частей
и делю его на несколько равных частей  . Из точки А радиусом, равным длине колебателя (100 мм) в масштабе
. Из точки А радиусом, равным длине колебателя (100 мм) в масштабе  угла размаха колебателя, и переношу разметку положений конца колебателя 0,1,2,3…,15.
угла размаха колебателя, и переношу разметку положений конца колебателя 0,1,2,3…,15.


