Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Порты микроконтроллера MCS-51Содержание книги
Поиск на нашем сайте
Все четыре порта МК51 предназначены для ввода или вывода информации побайтно. Схемотехника портов ввода/вывода МК51 для одного бита показана на рис.3.4(порты 1 и 2 имеют примерно такую же структуру, как и порт 3). Каждый порт содержит управляемые регистр-защелку, входной буфер и выходной драйвер.
Рис. 3.4. Схемотехника портов ввода/вывода МК51: а - порт 0; б - порт 3 Выходные драйверы портов 0 и 2, а также входной буфер порта 0 используются при обращении к внешней памяти (ВП). При этом через 1 порт 0 в режиме временного мультиплексирования сначала выводится младший байт адреса ВП, а затем выдается или принимается байт данных. Через порт 2 выводится старший байт адреса в тех случаях, когда 1 разрядность адреса равна 16 бит. Все выводы порта 3 могут быть использованы для реализации альтернативных функций, перечисленных в табл.8.1. Альтернативные функции могут быть задействованы путем записи 1 в соответствующие биты регистра-защелки (Р3.0-Р3.7) порта 3. Таблица 8.1. Альтернативные функции порта 3
Порт 0 является двунаправленным, а порты 1, 2 и З - квазидвунаправленными. Каждая линия портов может быть использована независимо для ввода или вывода информации. Для того чтобы некоторая линия порта использовалась для ввода, в D-триггер регистра-защелки порта должна быть записана 1, которая закрывает МОП-транзистор выходной цепи. По сигналу СБР в регистры-защелки всех портов автоматически записываются единицы, настраивающие их тем самым на режим ввода. Все порты могут быть использованы для организации ввода/вывода информации по двунаправленным линиям передачи. Однако порты 0 и 2 не могут быть использованы для этой цели в случае, если МК-система имеет внешнюю память, связь с которой организуется через общую разделяемую шину адреса/данных, работающую в режиме временного мультиплексирования. Запись в порт. При выполнении команды, которая изменяет содержимое регистра-защелки порта, новое значение фиксируется в регистре в момент S6P2 последнего цикла команды. Однако опрос содержимого регистра-защелки выходной схемой осуществляется во время фазы Р1 и, следовательно, новое содержимое регистра-защелки появляется на выходных контактах порта только в момент S1P1 следующего машинного цикла. Нагрузочная способность портов. Выходные линии портов 1, 2 и 3 могут работать на одну ТТЛ-схему. Линии порта 0 могут быть нагружены на два входа ТТЛ-схем каждая. Линии порта 0 могут работать и на n-МОП-схемы, однако при этом их необходимо подключать на источник электропитания через внешние нагрузочные резисторы за исключением случая, когда шина порта 0 используется в качестве шины адреса/данных внешней памяти. Входные сигналы для МК51 могут формироваться ТТЛ-схемами или n-МОП-схемами. Допустимо использование в качестве источников сигналов для МК51 схем с открытым коллектором или открытым стоком. Однако при этом время изменения входного сигнала при переходе из 0 в 1 окажется сильно затянутым. Особенности работы портов. Обращение к портам ввода/вывода возможно с использованием команд, оперирующих с байтом, отдельным битом и произвольной комбинацией бит. При этом в тех случаях, когда порт является одновременно операндом и местом назначения результата, устройство управления автоматически реализует специальный режим, который называется "чтение-модификация-запись". Этот режим обращения предполагает ввод сигналов не с внешних выводов порта, а из его регистра-защелки, что позволяет исключить неправильное считывание ранее выведенной информации. Подобный механизм обращения к портам реализован в следующих командах: ANL - логическое И, например ANL Р1, А; ORL - логическое ИЛИ, например ORL P2, А; XRL - исключающее ИЛИ, например XRL РЗ, А; JBC - переход, если в адресуемом бите единица, и последующий сброс бита, например JBC P1.1, LABEL; CPL - инверсия бита, например CPL P3.3; INC - инкремент порта, например INC P2; DEC - декремент порта, например DEC P2; DJNZ - декремент порта и переход, если его содержимое не равно нулю, например DJNZ РЗ, LABEL; MOV PX.Y, C - передача бита переноса в бит Y порта X; SET PX.Y - установка бита Y порта X; CLR PX.Y - сброс бита Y порта X. Совсем не очевидно, что последние три команды в приведенном списке являются командами "чтение-модификация-запись". Однако это именно так. По этим командам сначала считывается байт из порта, а затем записывается новый байт в регистр-защелку. Причиной, по которой команды "чтение-модификация-запись" обеспечивают раздельный доступ к регистру-защелке порта и к внешним выводам порта, является необходимость исключить возможность неправильного прочтения уровней сигналов на внешних выводах. Предположим для примера, что линия Y порта Х соединяется с базой мощного транзистора и выходной сигнал на ней предназначен для его управления. Когда в данный бит записана 1, то транзистор включается. Если для проверки состояния исполнительного механизма (в нашем случае - мощного транзистора) прикладной программе требуется прочитать состояние выходного сигнала в том же бите порта, то считывание сигнала с внешнего вывода порта, а не из D-триггера регистра-защелки порта приведет к неправильному результату: единичный сигнал на базе транзистора имеет относительно низкий уровень и будет интерпретирован в МК как сигнал 0. Команды "чтение-модификация-запись" реализуют считывание из регистра-защелки, а не с внешнего вывода порта, что обеспечивает получение правильного значения 1. На рис.3.5. приведены временные диаграммы, иллюстрирующие процесс выполнения операций ввода/вывода информации через порты МК51.
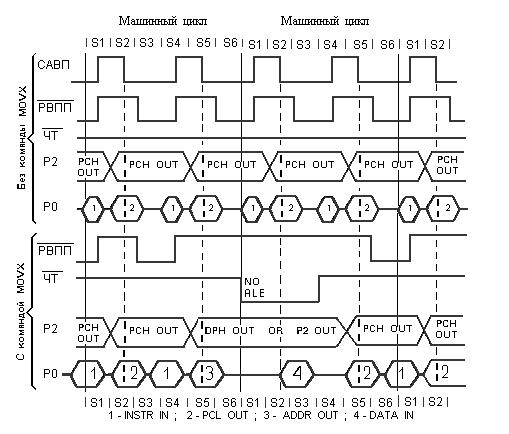
Рис. 3.5. Временные диаграммы операций ввода/вывода Доступ к внешней памяти В микроконтроллерных системах, построенных на основе МК51, возможно использование двух типов внешней памяти: постоянной памяти программ (ВПП) и оперативной памяти данных (ВПД). Доступ к ВПП осуществляется при помощи управляющего сигнала РВПП, который выполняет функцию строб-сигнала чтения. Доступ к ВПД обеспечивается управляющими сигналами ЗП, которые формируются в линиях Р3.7 и Р3.6 при выполнении портом 3 альтернативных функций. При обращении к ВПП всегда используется 16-битный адрес. Доступ к ВПД возможен с использованием 16-битного адреса (MOVX A, @DPTR) или 8-битного адреса (MOVX A, @Ri). В любых случаях использования 16-битного адреса старший байт адреса фиксируется (и сохраняется неизменным в течение одного цикла записи или чтения) в регистре-защелке порта 2. Если очередной цикл внешней памяти (MOVX A, @DPTR) следует не сразу же за предыдущим циклом внешней памяти, то неизменяемое содержимое регистра-защелки порта 2 восстанавливается в следующем цикле. Если используется 8-битный адрес (MOVX A, @Ri), то содержимое регистра-защелки порта 2 остается неизменным на его внешних выводах в течение всего цикла внешней памяти. Через порт 0 в режиме временного мультиплексирования осуществляется выдача младшего байта адреса и передача байта данных. Сигнал САВП должен быть использован для записи байта адреса во внешний регистр. Затем в цикле записи выводимый байт данных появляется на внешних выводах порта 0 только перед появлением сигнала ЗП. В цикле чтения вводимый байт данных принимается в порт 0 по фронту стробирующего сигнала. При любом обращении к внешней памяти устройство управления MK51 загружает в регистр-защелку порта 0 код 0FFH, стирая тем самым информацию, которая могла в нем храниться. Доступ к ВПП возможен при выполнении двух условий: либо на вход отключения резидентной памяти программ (ОРПП) подается активный сигнал, либо содержимое счетчика команд превышает значение 0FFFH. Наличие сигнала ОРПП необходимо для обеспечения доступа к младшим 4К адресам адресного пространства ВПП при использовании МК31 (микроконтроллера без резидентной памяти программ). Временные диаграммы на рис. 3.6 иллюстрируют процесс генерации управляющих сигналов САВП и РВПП при обращении к внешней памяти.
Рисунок 3.6. Временные диаграммы операций с обращением к внешней памяти Основная функция сигнала САВП – обеспечить временное согласование передачи из порта 0 на внешний регистр младшего байта адреса в цикле чтения из ВПП. Сигнал САВП приобретает значение 1 дважды в каждом машинном цикле. Это происходит даже тогда, когда в цикле выборки нет обращения к ВПП. Доступ к ВПД возможен только в том случае, если сигнал САВП отсутствует. Первый сигнал САВП во втором машинном цикле команды MOVX блокируется. Следовательно, в любой МК-системе, не использующей ВПД, сигнал САВП генерируется с постоянной частотой, равной 1/16 частоты резонатора, и может быть использован для синхронизации внешних устройств или для реализации различных временных функций. При обращении к РПП сигнал РВПП не генерируется, а при обращении к ВПП он выполняет функцию строб-сигнала чтения. Полный цикл чтения ВПД, включая установку и снятие сигнала ЧТ, занимает 12 периодов резонатора. Временные диаграммы на рис. 3.7 и рис. 3.8 иллюстрируют процесс выборки команды из ВПП и работу с ВПД в режимах чтения и записи соответственно.
Рисунок 3.7. Временная диаграмма выборки команды из ВПП
Рисунок 3.8. Временная диаграмма работы с ВДП Особый режим работы МК51. Содержимое памяти программ МК51 заполняется единожды на этапе разработки МК-системы и не может быть модифицировано в завершенном (конечном) изделии. По этой причине микроконтроллеры не являются машинами классической "фон-неймановской" архитектуры. Оперативная память данных (резидентная или внешняя) не может быть использована для хранения кодов программы, так как в МК выборка команд производится только из области адресов памяти программ. Эта особенность архитектуры МК объясняется тем, что в большинстве применений МК требуется наличие одной неизменяемой прикладной программы, хранимой в ПЗУ, наличие ОЗУ небольшой емкости для временного хранения переменных и эффективных, а следовательно, разных методов адресации памяти программ и памяти данных. Однако на этапе разработки и отладки прикладных программ машина "фон-неймановского" типа оказывается очень удобной, так как позволяет разработчику оперативно изменять коды прикладной программы, размещаемой в ОЗУ. С этой целью МК-система может быть модифицирована для совмещения адресного пространства ВПП и ВПД путем подключения внешней логики, как показано на рис. 3.9
Рисунок 3.9. Схема совмещения адресного пространства Здесь на выходе схемы И формируется строб-сигнал чтения, который может быть использован для объединения памяти программ и памяти данных во внешнем ОЗУ. При этом необходимо учитывать, что в МК51 на схемном уровне реализуются пять различных и независимых механизмов адресации для доступа к ПРР, РПД, ВПП, ВПД и блоку регистров специальных функций. Вследствие этого перемещаемая версия прикладной программы, которая отлаживается в среде внешней памяти программ/данных, будет отличаться от загружаемой в РП (окончательной) версии программы. Подобный способ организации управления внешней памятью может быть использован в тех применениях МК51, где требуется оперативная перезагрузка или модификация прикладных программ (с помощью УВВ), как в ЭВМ классической архитектуры. Таймер/счетчик MCS-51 Два программируемых 16-битных таймера/счетчика (T/C0 и T/C1) могут быть использованы в качестве таймеров или счетчиков внешних событий. При работе в качестве таймера содержимое T/C инкрементируется в каждом машинном цикле, т.е. через каждые 12 периодов резонатора. При работе в качестве счетчика содержимое Т/С инкрементируется под воздействием перехода из 1 в 0 внешнего входного сигнал; подаваемого на соответствующий (T0, T1) вывод МК51. Опрос значения внешнего входного сигнала выполняется в момент времени S5P2 каждого машинного цикла. Содержимое счетчика будет увеличено на 1 в том случае, если в предыдущем цикле был считан входной сигнал высокого уровня (1), а в следующем – сигнал низкого уровня (0). Новое (инкрементированное) значение счетчика будет сформировано в момент S3P1 в цикле, следующем за тем, в котором был обнаружен переход сигнала из 1 в 0. Так как на распознавание перехода требуется два машинных цикла, то максимальная частота подсчета входных сигналов равна 1/24 частоты резонатора. На длительность периода входных сигналов ограничений сверху нет. Для гарантированного прочтения входного считаемого сигнала он должен удерживать значение 1 как минимум течение одного машинного цикла МК51. Для управления режимами работы T/C и для организации взаимодействия таймеров с системой прерывания используются два регистра специальных функций (РРТС и РУСТ), описание которых приводите в табл.10.1. и табл.10.2 соответственно. Как следует из описания управляющих бит РРТС, для обоих T/C режимы работы 0, 1 и 2 одинаковы. Режимы для T/C0 и T/C1 различны. Рассмотрим кратко работу T/C во всех четырех режимах. Таблица 10.1. Регистр режима работы таймера/счетчика
Таблица 10.2. Регистр управления/статуса таймера
Режим 0. Перевод любого Т/С в режим 0 делает его похожим на таймер МК48 (8-битный счетчик), на вход которого подключен 5-битный предделитель частоты на 32. Работу Т/C в режиме 0 на примере Т/C1 иллюстрирует рис.3.10,а. В этом режиме таймерный регистр имеет разрядность 13 бит. При переходе из состояния "все единицы" в состояние "все нули" устанавливается флаг прерывания от таймера TF1. Входной синхросигнал таймера 1 разрешен (поступает на вход T/C), когда управляющий бит TR1 установлен в 1 и либо управляющий бит GATE (блокировка) равен 0, либо на внешний вывод запроса прерывания INT1 поступает уровень 1. Отметим попутно, что установка бита GATE в 1 позволяет использовать таймер для измерения длительности импульсного сигнала, подаваемого на вход запроса прерывания. Режим 1. Работа любого Т/С в режиме 1 такая же, как и в режиме 0, за исключением того, что таймерный регистр имеет разрядность 16 бит. Режим 2. В режиме 2 работа организована таким образом, что переполнение (переход из состояния "все единицы" в состояние "все нули") 8-битного счетчика TL1 приводит не только к установке флага TF1(рис.3.10,б), но и автоматически перезагружает в TL1 содержимое старшего байта (TH1) таймерного регистра, которое предварительно было задано программным путем. Перезагрузка оставляет содержимое ТН1 неизменным. В режиме 2 Т/С0 и Т/С1 работают совершенно одинаково.
Рис. 3.10. Таймер/счетчик событий: а - T/C1 в режиме 0: 13-битный счетчик: б - Т/С1 в режиме 2: 8-битный автоперезагружаемый счетчик;
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-12-15; просмотров: 1449; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.31.27 (0.01 с.) |