
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Система автоматической регулировки усиленияАРУ
Автоматическая регулировка усиления обеспечивает стабильность уровня сигнала на выходе усилителя при изменении уровня входного сигнала. В современных приёмниках уровень входного сигнала может изменяться в широких пределах: от 60 дБ в приёмниках радиосвязи и до 120 дБ в радиолокационных. Нормальная работа оконечного аппарата требует, чтобы изменения выходного сигнала приёмника не превышали 4-6 дБ. Для выполнения этих требований глубина регулировки усилителя системой АРУ должна составлять 56-116 дБ. Функциональная схема приведена на рис.10, где приняты следующие обозначения: РУ – регулируемый усилитель; АД – амплитудный детектор; УПТ – усилитель постоянного тока; ФНЧ – фильтр нижних частот; U BX – напряжение входного сигнала; U ВЫХ – выходной сигнал; E З – напряжение задержки детектирования; E Р – напряжение регулировки. Работает система АРУ следующим образом. При увеличении амплитуды входного сигнала U BX возрастает амплитуда выходного напряжения U ВЫХ: U ВЫХ = K (E Р) U ВХ , где К (Е Р) – модуль резонансного коэффициента передачи усилителя, величина которого зависит от напряжения регулировки Е Р, вырабатываемого системой АРУ. После амплитудного детектора выделяется выпрямленное напряжение U B, величина которого в случае задержанной АРУ равна:
где
Выпрямленное детектором напряжение проходит через УПТ и ФНЧ и создаёт напряжение регулировки: E Р = K УПТ K ФНЧ U В. Это напряжение подводится к регулируемым каскадам усилителя и уменьшает коэффициент усиления в соответствии с регулировочной характеристикой усилителя: K = K (E Р). Система АРУ, не имеющая УПТ и схемы задержки, называется простой АРУ. Её характеристики можно получить, положив Е З = 0 и К УПТ = 1. Схема АРУ, содержащая УПТ, называется усиленной, содержащая схему задержки – задержанной. Основными функциональными узлами системы АРУ считаются: регулируемый усилитель; амплитудный детектор со схемой задержки; усилитель постоянного тока; фильтр нижних частот. Важнейшей характеристикой регулируемого усилителя является его регулировочная характеристика – зависимость модуля резонансного коэффициента передачи от напряжения регулировки (рис.11).
Отношение максимального усиления (коэффициента передачи) к минимальному называют глубиной регулировки. Глубина регулировки определяется выражениями
где Реальная регулировочная характеристика нелинейнанелинейная. При расчёте системы АРУ используются различные виды её аппроксимации: линейная, линейно-ломаная, экспоненциальная.
Основные способы регулировки усиления: - режимная регулировка (изменение крутизны проходной характеристики транзистора | Y21 | путём изменения режима его работы по постоянному току); - изменение сопротивления нагрузки усилителя; - изменение глубины обратной связи; - изменение величины межкаскадной связи с помощью управляемых аттенюаторов; - изменение степени связи контура с транзистором. От устройств регулировки требуются: существенная зависимость К O от Е Р; малый ток регулировки; малая зависимость других параметров усилителя от напряжения Е Р. На рис.12 показан принцип регулировки усиления транзистора путём изменения его режима по постоянному току. Регулировка усиления достигается за счёт изменения тока эмиттера. Регулирующее напряжение подаётся в цепь базы транзистора. Напряжение смещения на базе транзистора: U БЭ = U 0 – E P,
где U 0 – падение напряжения на резисторе R 2. По мере увеличения Е Р напряжение U БЭ уменьшается, что ведёт за собой уменьшение тока эмиттера и крутизны проходной характеристики | Y 21|. В результате снижается коэффициент усиления.
Зависимость коэффициента усиления от тока эмиттера показана на рис.13. На участке АБ коэффициент усиления растёт пропорционально величине тока эмиттера. Напряжение на коллекторе U К ещё достаточно велико, и его изменения практически не влияют на коэффициент усиления. На участке БВ влияние увеличивающегося тока I Э и уменьшающегося напряжения U К на усилительные свойства каскада одинаково и противоположно, в связи с чем коэффициент усиления не изменяется. На участке ВГ напряжение U К становится настолько малым, что усилительные свойства каскада снижаются, несмотря на большой ток эмиттера. Регулировку на участке АБ обычно называют обратной, а на участке ВГ – прямой. Режимная регулировка имеет ряд недостатков: 1. Вв процессе регулирования изменяются практически все параметры транзистора, включая его входную и выходную проводимости. Это влечёт за собой расстройку контуров в цепи базы и коллектора регулируемого транзистора, а также изменение добротности контуров. В результате изменяются частота настройки и полоса пропускания усилителя. Для уменьшения этого эффекта приходится ограничивать величину связи транзистора с контурами, что ведёт к потере усиления; 2. И-изменениеИзменение режима работы транзистора сопровождается ростом уровня нелинейных эффектов. Поэтому рекомендуется осуществлять регулировку усиления в тех каскадах приёмника, которые работают с малым уровнем сигнала. В случае обратной регулировки (участок АБ на рис.13) коэффициент усиления пропорционален току эмиттера в определённом диапазоне его изменения (от 0,1 до 1 мА). В этом диапазоне токов глубина регулировки составляет 20 дБ. При малых токах эмиттера можно получить более глубокую регулировку усиления, но возрастают нелинейные искажения и значительно ухудшается температурная стабильность каскада. При больших токах регулировки её эффективность уменьшается. Допустимый максимальный уровень входного сигнала усилителя
где К Г – коэффициент гармоник; m – коэффициент модуляции; а» 40 мВ – расчётный коэффициент. В схеме без обратной связи по цепи эмиттера U вх max = 10...15 мВ. Детектор АРУ предназначен для преобразования амплитудно-модулированных колебаний, полученных с выхода УПЧ, в колебания низкой частоты, среднее значение которых, выделяемое фильтром АРУ, пропорционально амплитуде напряжения несущей частоты. В качестве схем детекторов АРУ применяются те же схемы детекторов, что и для детектирования сигнала в основном канале. Однако применение совмещённых схем детектирования обычно себя не оправдывает, так как при этом нельзя осуществлять детектирование с задержкой, вызывающее недопустимые нелинейные искажения в основном канале. Детектирование колебаний в цепи АРУ с задержкой имеет то преимущество, что при слабых сигналах, когда детектор АРУ заперт, не уменьшается
Назначением фильтра в цепи АРУ является выделение из продетектированного сигнала постоянной составляющей напряжения, пропорциональной амплитуде колебаний несущей частоты. Фильтр АРУ должен удовлетворять следующим требованиям: - осуществлять достаточное подавление низшей модулирующей частоты что необходимо для устранения явлений демодуляции и искажений сигнала, вызываемых цепью АРУ при приёме АМ – колебаний; - обеспечивать возможность отслеживания системой АРУ наиболее быстрых изменений уровня сигнала, вызванных, например, явлением замирания. Эти требования являются противоречивыми. Первое определяет минимально допустимое значение постоянной времени фильтра, второе – максимально допустимое. Дополнительным требованием к фильтру является требование минимального фазового сдвига по низкой частоте. Оно является необходимым условием обеспечения устойчивой работы замкнутой цепи АРУ. В качестве фильтра обычно используют однозвенную RC -цепь (интегрирующий фильтр). Для улучшения взаимной развязки между отдельными звеньями электронного регулятора приходится включать дополнительные RC -звенья в цепи подачи напряжения регулировки на каждое звено к цепям усилителя в соответствии с рис.15. Если постоянные времени дополнительных звеньев выбрать много меньше постоянной времени основного фильтра (в 10 и более раз), то дополнительный фазовый сдвиг окажется незначительным и не приведёт к самовозбуждению системы АРУ.
Статической характеристикой системы АРУ называют амплитудную характеристику усилителя с АРУ, каждая точка которой соответствует установившемуся режиму регулирования: U ВЫХ = f(U ВХ ), t ® ¥. Нетрудно получить связь между амплитудами на входе и выходе усилителя:
Примерный вид статических характеристик различных систем АРУ представлен на рис.16. Величина задержки Е З выбирается обычно на уровне, соответствующем чувствительности усилителя U BX 0 = U BX min. Диапазон изменения амплитуды входного сигнала составляет
При этом диапазон изменения амплитуды выходного сигнала рассчитывается (при линейной аппроксимации регулировочной характеристики) по формуле
Благодаря применению системы АРУ достигается существенное расширение входного динамического диапазона при заданном выходном: d ВХ>> d ВЫХ.
Чем больше D BX усилителя и чем меньше соответствующий ему диапазон D ВЫХ, тем более качественной считается система АРУ усилителя. Идеальной называют систему АРУ, которая обеспечивает D ВЫХ = 0 при заданном D BX.
D АРУ = (D ВХ – D ВЫХ), где D АРУ – необходимая глубина регулировки усиления, дБ; D ВХ, D ВЫХ – входной и выходной динамические диапазоны, дБ. Система АРУ вносит искажения в закон амплитудной модуляции сигнала при его усилении. Эти искажения не должны превышать допустимых пределов. Искажения сигнала возникают в том случае, когда величина напряжения регулировки Е Р начинает изменяться в соответствии с модуляцией входного сигнала, т.е. при недостаточной величине постоянной времени ФНЧ в цепи АРУ. Выбор величины постоянной времени ФНЧ в цепи АРУ играет большое значение. При слишком большой постоянной времени система АРУ не успевает компенсировать изменения уровня входного сигнала. При слишком малой постоянной времени происходит уменьшение коэффициента модуляции сигнала в области нижних частот, и возникают нелинейные искажения закона модуляции. При расчёте постоянной времени фильтра Т учитывают, что постоянная времени системы АРУ значительно меньше постоянной времени фильтра: τАРУ<< Т. Для оценки линейных искажений сигнала вводится понятие коэффициента передачи усилителя с АРУ для коэффициента модуляции
где В случае системы АРУ с интегрирующим фильтром
где Т – постоянная времени ФНЧ; D 0 – петлевое усиление АРУ для постоянного тока; W – частота модуляции сигнала. Величина петлевого усиления зависит от параметров системы и амплитуды входного сигнала: D 0 = SК УПТ К D U BX. Условием отсутствия линейных искажений является близость к единице величины |
где F – нижняя частота модуляции; | К М| – наименьшее допустимое значение коэффициента передачи для коэффициента модуляции; D 0 – петлевое усиление, приблизительно равное необходимой глубине регулировки усиления системой АРУ. Одно из важнейших требований к системе АРУ – её устойчивость, т.е. отсутствие самовозбуждения во всём диапазоне амплитуд входного сигнала. Самовозбуждение системы АРУ проявляется в том, что при немодулированном входном сигнале регулируемого усилителя в его выходном напряжении возникает паразитная амплитудная модуляция (ПАМ), которая поддерживается за счёт действия системы АРУ. В статическом режиме АРУ представляет собой систему с отрицательной параметрической обратной связью, что обеспечено её схемным решением. Коэффициент усиления регулируемого усилителя уменьшается с ростом амплитуды сигнала. В динамическом режиме нормальная работа АРУ может нарушиться из-за влияния инерционных элементов в её цепи: ФНЧ, развязывающих фильтров, полосовых фильтров и т.д. Для огибающей амплитудно-модулированного сигнала эти инерционные элементы создают фазовый сдвиг. Напряжение регулировки E P(t) оказывается дополнительно сдвинутым по фазе относительно огибающей входного сигнала U BX(t). На некоторой частоте этот фазовый сдвиг может составить 180°, что изменит знак обратной связи, сделав её положительной. Если петлевое усиление системы на этой критической частоте превосходит единицу, в системе АРУ возникает самовозбуждение. Коэффициент усиления регулируемого усилителя изменяется с частотой самовозбуждения, что вызывает изменение амплитуды выходного сигнала регулируемого усилителя. Возникшая ПАМ выходного сигнала в свою очередь приводит к появлению переменной составляющей в напряжении регулировки, которая поддерживает периодическое изменение величины коэффициента усиления. В соответствии с критерием устойчивости Найквиста, система регулирования находится на пороге самовозбуждения, если выполняется условие
где W (jW) – комплексный коэффициент передачи разомкнутой системы на критической частоте; j(W) – фазовый сдвиг в инерционных элементах системы. Для системы АРУ
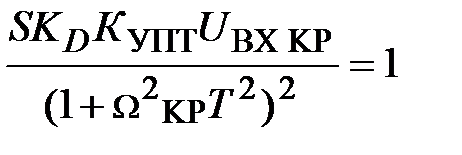
где S – крутизна регулировочной характеристики усилителя; K D – коэффициент передачи детектора АРУ; К УПТ – коэффициент усиления в цепи обратной связи; U BX – амплитуда входного сигнала регулируемого усилителя; tЗ – время задержки сигнала в селективном тракте; К Ф(jW) – коэффициент передачи линейных цепей низкой частоты. Если регулируемый усилитель содержит, например, три одинаково настроенных резонансных контура, а ФНЧ представляет собой однозвенный интегрирующий фильтр, то критические параметры самовозбуждения Ω крτ з + arctg(Ω кр T) = π,
где В этом случая система АРУ, как правило, оказывается устойчивой, так как значение U BX KP оказывается за пределами динамического диапазона входных сигналов. Иное дело, когда используются многозвенные фильтры низких частот. Если использовать, например, последовательное соединение четырёх одинаковых интегрирующих звеньев, то уравнения для их критических параметров приобретают вид
В этом случае можно пренебречь величиной tЗ и получить решение в виде
где Частота самовозбуждения понижается по сравнению с ранее рассмотренным вариантом однозвенного ФНЧ, а значение U BX KP оказывается в пределах динамического диапазона входных сигналов. Следовательно, система АРУ теряет устойчивость при U ВХ > U BX KP. В связи с тем, что использование многозвенных ФНЧ с одинаковыми (или близкими по величине) постоянными времени звеньев приводит к потере устойчивости системы АРУ, применять многозвенные ФНЧ не рекомендуется.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-25; просмотров: 1924; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.120.109 (0.064 с.) |

 – коэффициент передачи детектора;
– коэффициент передачи детектора;  – напряжение задержки.
– напряжение задержки.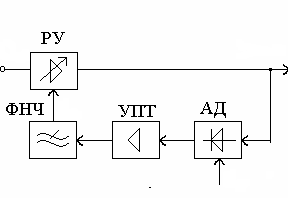
 , или
, или  ,
, - безразмерная глубина регулировки;
- безразмерная глубина регулировки;  - глубина регулировки, дБ;
- глубина регулировки, дБ;  ,
,  - максимальный и минимальный коэффициенты усиления.
- максимальный и минимальный коэффициенты усиления. ,
,  ─ напряжения регулировки, соответствующие максимальному и минимальному усилению.
─ напряжения регулировки, соответствующие максимальному и минимальному усилению. ,
,

 .
. .
. дБ.
дБ.
 - комплексные коэффициенты модуляции входного и выходного сигналов усилителя по амплитуде. Зависимость модуля |
- комплексные коэффициенты модуляции входного и выходного сигналов усилителя по амплитуде. Зависимость модуля |  | от частоты модуляции приводит к амплитудно-частотным искажениям сигнала.
| от частоты модуляции приводит к амплитудно-частотным искажениям сигнала.
 | во всём диапазоне изменения частот модуляции. В этом случае также практически отсутствуют и нелинейные искажения. В связи со сказанным, постоянная времени ФНЧ выбирается из условия
| во всём диапазоне изменения частот модуляции. В этом случае также практически отсутствуют и нелинейные искажения. В связи со сказанным, постоянная времени ФНЧ выбирается из условия
 ,
, ,
, ─ запаздывание сигнала в усилителе; П – полоса пропускания регулируемого усилителя по уровню 0,7; Т – постоянная времени ФНЧ.
─ запаздывание сигнала в усилителе; П – полоса пропускания регулируемого усилителя по уровню 0,7; Т – постоянная времени ФНЧ. ,
, .
. ,
, ,
, – частота самовозбуждения АРУ, Гц,
– частота самовозбуждения АРУ, Гц,  – амплитуда входного сигнала, при которой начинается самовозбуждение АРУ, В.
– амплитуда входного сигнала, при которой начинается самовозбуждение АРУ, В.


