
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Трение. Виды трения. Законы трения скольжения. Равновесие при наличии трения скольжения.
При скольжении тела по шероховатой поверхности возникает сила реакции, которая имеет две составляющие – нормальную и силу трения скольжения (рисунок 2.1). Сила трения скольжения, приложенная к одному из трущихся тел, направлена противоположно его скорости относительно второго тела.
В результате экспериментальных исследований были установлены законы Амонтона-Кулона: 1) сила трения скольжения находится в общей касательной плоскости соприкасающихся поверхностей тел и направлена в сторону, противоположную направлению возможного скольжения тела под действием активных сил. Величина силы трения зависит от активных сил и заключена между нулем и своим максимальным значением, которое достигается в момент выхода тела из положения равновесия (0 ≤ Fтр ≤ Fтрmax); 2) максимальное значение силы трения скольжения не зависит от площади контакта, а определяется величиной нормальной реакции, материалом и состоянием контактирующих поверхностей; Fтрmax = fN, где f – коэффициент трения скольжения, который является безразмерной величиной и зависит от материала и физического состояния трущихся поверхностей, а также от скорости движения тела и удельного давления. Экспериментально установлено, что f < fсц. Рассмотрим твердое тело на шероховатой поверхности (рисунок 2.2), находящееся под действием активных сил в предельном состоянии равновесия, т.е. когда сила трения достигает своего наибольшего значения при данном значении нормальной реакции. В этом случае полная реакция шероховатой поверхности отклонена от нормали к общей касательной плоскости трущихся поверхностей на наибольший угол (Rmax). Этот наибольший угол между полной реакцией, построенной на наибольшей силе трения при данной нормальной реакции и направлением нормальной реакции, называется углом трения φ:
tgφ = Fтрmax/N = fN/N = f.
Понятие момента силы относительно оси. Уравнение равновесия произвольной пространственной системы сил. Произвольной пространственной системой сил называется система сил, линии действия которых не лежат в одной плоскости. Согласно основной теореме статики (теореме Пуансо) любую произвольную систему сил, действующую на твердое тело, можно заменить эквивалентной системой, состоящей из силы (главного вектора системы) и пары сил (главного момента системы сил).
Отсюда вытекает условие равновесия произвольной пространственной системы сил. В геометрической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент системы равнялись нулю R = 0, Mo = 0. В аналитической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три координатные оси и суммы моментов всех сил относительно этих осей были равны нулю ΣFkx = 0, ΣFky = 0, ΣFkz = 0, Mx(Fk) = 0, My(Fk) = 0, Mz(Fk) = 0. Условия равновесия могут быть использованы для решения задач на равновесие при определении неизвестных величин (реакций связей). Чтобы задача была статически определимой, число неизвестных должно быть не более шести. В частности, для системы параллельных сил условиями равновесия являются следующие равенства ΣFkx = 0, Mx(Fk) = 0, My(Fk) = 0.
11.Понятие центра тяжести твердого тела. Формулы координат центров тяжести однородных тел (объема, площади, линии). Способы определения положения центров тяжести тел (симметрия, разбиение, способ отрицательных весов). Центром тяжести тела называется точка Сприложения силы тяжести тела.
При любом повороте тела силы Координаты центра тяжести неоднородного твердого тела (рис.4) в выбранной системе отсчета определяются следующим образом:
Рис.4
где
Если твердое тело представляет собой неоднородную поверхность (рис.5), то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
Рис.5
где
Если твердое тело представляет собой неоднородную линию (рис.6), то координаты центра тяжести в выбранной системе отсчета определяются следующим образом:
Рис.6
где
Способы определения координат центра тяжести. 1. Симметрия. Если однородное тело имеет плоскость, ось или центр симметрии (рис.7), то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии.
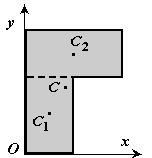
Рис.7 2. Разбиение. Тело разбивается на конечное число частей (рис.8), для каждой из которых положение центра тяжести и площадь известны.
Рис.8
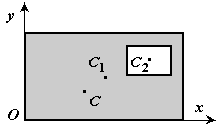
S=S1+S2. 3. Метод отрицательных площадей. Частный случай способа разбиения (рис.9). Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Тело в виде пластинки с вырезом представляют комбинацией сплошной пластинки (без выреза) с площадью S1 и площади вырезанной части S2 .
Рис.9
S=S1-S2. 4. Метод группировки. Является хорошим дополнением двух последних методов. После разбиения фигуры на составные элементы часть их бывает удобно объединить вновь, чтобы затем упростить решение путем учета симметрии этой группы. Кинематика Кинематика как раздел теоретической механики. Основные понятия кинематики (система отсчета, траектория точки, прямолинейное и криволинейное движения точки, равномерное и неравномерное движение точки,скорость точки, ускорение точки). Основная задача кинематики. Кинематикой называется раздел теоретической механики, изучающий движение материальных точек и твердых тел без учета причин, вызывающих это движение. Кинематика рассматривает механическое движение твердого тела без учета сил, вызвавших это движение.Основная задача кинематики - описать движение тела в пространстве в зависимости от времени, не выясняя причин движения. Под механическим движением понимается изменение положения тела в пространстве и во времени относительно какого-либо другого тела, с которым обычно связывают систему координат, называемую системой отсчета. Если координаты всех точек тела остаются неизменными во времени, то тело находится в состоянии покоя. Сама система координат также может находиться в движении. Движение тела относительно подвижной системы координат называется относительным, а относительно неподвижной – абсолютным. Определить движение тела с точки зрения кинематики – это значит найти координаты любой его точки в выбранной системе координат отсчета в данный момент времени. Линия, которую описывает движущаяся материальная точка в пространстве, называют траекторией. В зависимости от формы траектории движения бывают прямолинейными и криволинейными. (Движение по окружности или по дуге окружности является простейшим случаем криволинейного движения.) Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным. Для равномерно-прямолинейного движения ∆r= v ∆t, (1) где v – постоянный вектор. Из соотношения (1) видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени. Из (1) имеем
Ускоре́ние — физическая величина, определяющая быстроту изменения скорости тела, то есть первая производная от 0%A1%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D1%8C"скорости по времени. Ускорение является 0%92%D0%B5%D0%BA%D1%82%D0%BE%D1%80_(%D0%BC%D0%B0%D1%82%D0%B5%D0%BC%D0%B0%D1%82%D0%B8%D0%BA%D0%B0)"векторной величиной, показывающей, на сколько изменяется вектор скорости
13.Способы задания движения точки (векторный, координатный, естественный). Для задания движения точки можно применять один из следующих трех способов: 1) векторный, 2) координатный, 3) естественный. 1. Векторный способ задания движения точки. Пусть точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в любой момент времени можно определить, задав ее радиус-вектор
Рис.3 При движении точки М вектор
Равенство определяет закон движения точки в векторной форме, так как оно позволяет в любой момент времени построить соответствующий вектор Геометрическое место концов вектора 2. Координатный способ задания движения точки. Положение точки можно непосредственно определять ее декартовыми координатами х, у, z (рис.3), которые при движении точки будут с течением времени изменяться. Чтобы знать закон движения точки, т.е. ее положение в пространстве в любой момент времени, надо знать значения координат точки для каждого момента времени, т.е. знать зависимости x=f1(t), y=f2(t), z=f3(t). Уравнения представляют собой уравнения движения точки в прямоугольных декартовых координатах. Они определяют закон движения точки при координатном способе задания движения. Чтобы получить уравнение траектории надо из уравнений движения исключить параметр t. Так как начало
Если движение точки задано в полярных координатах r=r(t), φ = φ(t), где r — полярный радиус, φ — угол между полярной осью и полярным радиусом, то данные уравнения выражают уравнение траектории точки. Исключив параметр t, получим r = r(φ). 3. Естественный способ задания движения точки.
Рис.5
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее. Пусть кривая АВ является траекторией точки М при ее движении относительно системы отсчета Oxyz (рис.5) Выберем на этой траектории какую-нибудь неподвижную точку О', которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета (как на координатной оси).
Чтобы знать положение точки М на траектории в любой момент времени, надо знать зависимость s=f(t). Уравнение выражает закон движения точки М вдоль траектории. Функция s= f(t) должна быть однозначной, непрерывной и дифференцируемой. Таким образом, движение точки считается заданным естественным способом, если известна траектория и уравнение (или закон) движения точки по траектории. 14.Определение скорости и ускорения точки при векторном способе задания движения. Скорость - мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной. Единица измерения скорости – м/с. Часто используют и другие единицы, например, км/ч: 1 км/час=1/3,6 м/с. Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным. Для равномерно-прямолинейного движения ∆r= v ∆t, (1) где v – постоянный вектор. Вектор v называется скоростью прямолинейного и равномерного движения полностью его определяет. Из соотношения (1) видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени. Из (1) имеем
Пусть движущаяся точка находится в момент времени t в положении М, определяемом радиусом-вектором
Рис. 7
Отношение вектора перемещения точки к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени∆t:
Скоростью точки в данный момент времени t называется векторная величина v, к которой стремится средняя скорость vср при стремлении промежутка времени ∆t к нулю:
Итак, вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени. Так как предельным направлением секущей ММ 1 является касательная, то вектор скорости точки в данный момент времени направлен по касательной к траектории точки в сторону движения. 15.Определение скорости и ускорения точки при координатном способе задания движения. Вектор скорости точки
Таким образом, проекции скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени.
Зная проекции скорости, найдем ее модуль и направление (т.е. углы α, β, γ, которые вектор v образует с координатными осями) по формулам
Итак, численная величина скорости точки в данный момент времени равна первой производной от расстояния (криволинейной координаты) s точки по времени. Направлен вектор скорости по касательной к траектории, которая нам наперед известна. Определение ускорения при координатном способе задания движения Вектор ускорения точки
Или
т.е. проекция ускорения точки на координатные оси равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление ускорения найдутся из формул
где α1, β1, γ1 - углы, образуемые вектором ускорения с координатными осями.
16.Определение скорости и ускорения точки при естественном способе задания движения. Скорость - мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной. Единица измерения скорости – м/с. Часто используют и другие единицы, например, км/ч: 1 км/час=1/3,6 м/с. Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным. Определение скорости точки при естественном способе задания движения Величину скорости можно определить как предел (∆r – длина хорды ММ 1):
где ∆s – длина дуги ММ 1. Первый предел равен единице, второй предел – производная ds/dt. Следовательно, скорость точки есть первая производная по времени от закона движения:
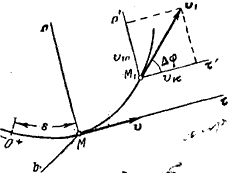
Направлен вектор скорости, как было установлено ранее, по касательной к траектории. Если величина скорости в данный момент будет больше нуля, то вектор скорости направляется в положительном направлении. Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени. В СИ единицей ускорения является метр на секунду в квадрате Пусть в некоторый момент времени t движущаяся точка находится в положении М и имеет скорость v, а в момент t1 приходит в положение M1 и имеет скорость v1 (рис. 8).
Рис.8
Тогда за промежуток времени ∆t=t1-t скорость точки получает приращение Отношение приращения вектора скорости
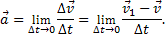
Вектор среднего ускорения имеет то же направление, что и вектор Ускорением точки в данный момент времени t называется векторная величина Ускорение точки равно нулю лишь тогда, когда скорость точки v постоянна как по величине, так и по направлению: это соответствует только прямолинейному и равномерному движению. Найдем, как располагается вектор При прямолинейном движении с возрастающей по модулю скоростью (рис. 9, а) векторы При прямолинейном движении с убывающей по модулю скоростью (рис. 9, б) направления векторов
Рис.9
Если траекторией точки является плоская кривая, то вектор ускорения Определение ускорения при естественном способе задания движения. Касательное и нормальное ускорение точки При движении точки по траектории направления естественных осей непрерывно изменяются.
Рис.11
ускорение точки Вычислим проекции Тогда по определению
проекция ускорения точки на касательную равна первой производной от численной величины скорости или второй производной от расстояния (криволинейной координаты) s noвремени, а проекция ускорения на главную нормаль равна квадрату скорости деленному на радиус кривизны траектории в данной точке кривой; проекция ускорения на бинормаль равна нулю (ab=0). Эти результаты выражают собою одну из важных теорем кинематики точки.
Рис.12
Отложим вдоль касательной Mτ и главной нормали Mn векторы Вектор ускорения точки
Поступательное движение твердого тела. Теорема о поступательном движении тела. Задание поступательного движения тела, уравнения поступательного движения. Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки. В дальнейшем под словом "тело" будем понимать "материальная точка". Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. На практике форму траектории задают с помощью математических формул (у=f(х) — уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета, связанной с вагоном, и парабола в системе отсчета, связанной с Землей. В зависимости от вида траектории различают прямолинейное и криволинейное движение. Путь s - скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0. Перемещение
где Проекция перемещения на ось Ох: ∆rx =∆х = х-х0, где x0 и x - координаты тела в начальный и конечный моменты времени. Модуль перемещения не может быть больше пути: Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется. Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:
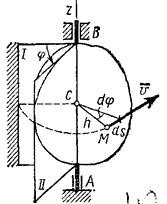
18.Вращательное движение твердого тела. Угол поворота тела, задание вращательного движения тела, уравнение вращательного движения. Угловая скорость и угловое ускорение. Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными (рис.9).
Рис.9 Чтобы знать положение тела в любой момент времени, надо знать зависимость угла φ от времени t, т.е. φ=f(t). Уравнение выражает закон вращательного движения твердого тела вокруг неподвижной оси. При вращательном движении абсолютно твердого тела вокруг неподвижной оси углы поворота радиуса-вектора различных точек тела одинаковы. Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость ω и угловое ускорение ε. Если за промежуток времени ∆t=t1-t тело совершает поворот на угол ∆φ=φ1-φ, то численно средней угловой скоростью тела за этот промежуток времени будет
Таким образом, числовое значение угловой скорости тела в данный момент времени равно первой производной от угла поворота по времени. Знак ω определяет направление вращения тела. Легко видеть, что когда вращение происходит против хода часовой стрелки, ω>0, а когда по ходу часовой стрелки, то ω<0. Размерность угловой скорости 1/Т (т.е. 1/время); в качестве единицы измерения обычно применяют рад/с или, что тоже, 1/с (с-1), так как радиан - величина безразмерная. Угол поворота и угловая скорость характеризуют движение всего абсолютно твердого тела в целом. Линейная скорость какой-либо точки абсолютно твердого тела пропорциональна расстоянию точки от оси вращения:
При равномерном вращении абсолютно твердого тела углы поворота тела за любые равные промежутки времени одинаковы, тангенциальные ускорения у различных точек тела отсутствуют, а нормальное ускорение точки тела зависит от ее расстояния до оси вращения:
Вектор Угловое ускорение характеризует изменение с течением времени угловой скорости тела. Если за промежуток времени ∆t=t1-t угловая скорость тела изменяется на величину ∆ω=ω1-ω, то числовое значение среднего углового ускорения тела за этот промежуток времени будет
Таким образом, числовое значение углового ускорения, тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени. Размерность углового ускорения 1/T2 (1/время2); в качестве единицы измерения обычно применяется рад/с2 или, что то же, 1/с2 (с-2). Если модуль угловой скорости со временем возрастает, вращение тела называется ускоренным, а если убывает, - замедленным. Вращение будет ускоренным, когда величины ω и εимеют одинаковые знаки, и замедленным, - когда разные.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1177; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.224.38.3 (0.139 с.) |



 остаются приложенными в одних и тех же точках и параллельными друг другу, но изменяется их направление относительно тела. Неизменным остается также положение центра тяжести относительно тела.
остаются приложенными в одних и тех же точках и параллельными друг другу, но изменяется их направление относительно тела. Неизменным остается также положение центра тяжести относительно тела.


 - вес единицы объема тела (удельный вес)
- вес единицы объема тела (удельный вес) - вес всего тела.
- вес всего тела.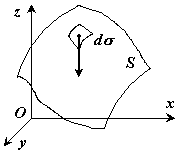


 - вес единицы площади тела,
- вес единицы площади тела, - вес всего тела.
- вес всего тела.



 - вес единицы длины тела,
- вес единицы длины тела, - вес всего тела.
- вес всего тела.







 тела при его движении за единицу времени:
тела при его движении за единицу времени:
 , проведенный из начала координат О в точку М (рис. 3).
, проведенный из начала координат О в точку М (рис. 3).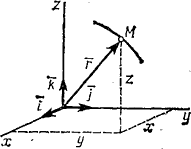



 (рис.7). Тогда перемещение точки за промежуток времени ∆t=t1-t определяется вектором
(рис.7). Тогда перемещение точки за промежуток времени ∆t=t1-t определяется вектором  который будем называть вектором перемещения точки. Из треугольника ОММ 1 видно, что
который будем называть вектором перемещения точки. Из треугольника ОММ 1 видно, что  ; следовательно,
; следовательно, 



 , учитывая, что rx=x, ry=y, rz=z, найдем:
, учитывая, что rx=x, ry=y, rz=z, найдем:

 в проекции на оси получаем:
в проекции на оси получаем:




 .
.
 . Для построения вектора
. Для построения вектора  отложим от точки М вектор, равный v 1, и построим параллелограмм, в котором диагональю будет
отложим от точки М вектор, равный v 1, и построим параллелограмм, в котором диагональю будет  , a одной из сторон
, a одной из сторон  . Тогда, очевидно, вторая сторона и будет изображать вектор
. Тогда, очевидно, вторая сторона и будет изображать вектор 
 , к которой стремится среднее ускорение
, к которой стремится среднее ускорение  при стремлении промежутка времени ∆t к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени.
при стремлении промежутка времени ∆t к нулю: Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени. сонаправлены (
сонаправлены ( ) и проекция ускорения на направление движения положительна.
) и проекция ускорения на направление движения положительна. ) и проекция ускорения на направление движения отрицательна.
) и проекция ускорения на направление движения отрицательна.

 и
и  , численно равные aτ и an (рис. 12). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая
, численно равные aτ и an (рис. 12). Эти векторы изображают касательную и нормальную составляющие ускорения точки. При этом составляющая 
 тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 2):
тела за определенный промежуток времени - направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 2): ,
, — радиус-векторы тела в эти моменты времени.
— радиус-векторы тела в эти моменты времени. ≤s.
≤s.

 . В пределе при ∆t→0 найдем, что
. В пределе при ∆t→0 найдем, что или ω=
или ω=  .
.

 направлен по радиусу траектории точки к оси вращения.
направлен по радиусу траектории точки к оси вращения. . В пределе при ∆t→0 найдем,
. В пределе при ∆t→0 найдем,



