
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Аппараты электрической схемы вагона.Стр 1 из 20Следующая ⇒
СОСТАВ ЭЛЕКТРООБОРУДОВАНИЯ В состав электрооборудования вагонов 81-740.1 и 81-741.1 входят: · комплекты электрооборудования тягового привода КАТП-1; · комплекты вспомогательного электрооборудования АЭК «Динамо»; · электродвигатель компрессорного агрегата GK 140 F27; · аккумуляторная батарея KPL 55; · пульты управления поездом и вагоном (ПМО, ПМВ, пульт управления маневровый); · приборы и устройства защиты электрических цепей (предохранители, автоматические выключатели и др.); · электроизмерительные приборы; · электрооборудование, устройства и приборы систем отопления, обогрева, вентиляции салонов и кабины (тепловентиляторы, блоки управления и коммутации системы СОВС, электротепловентилятор обогрева кабины; блочный термокондиционер и др.); · электрооборудование систем освещения салонов, кабины, аппаратного отсека и наружного освещения вагона (светильники «световых линий», светильники освещения кабины, светильники аппаратного отсека, фары, габаритные фонари); · аппараты и приборы системы управления движением поезда, безопасности и диагностики «Витязь»; · аппаратура и устройства АСОТП «Игла-М-Н»; · электрооборудование системы видеонаблюдения подвижного состава; · источники (преобразователи, блоки питания) специального напряжения для питания отдельных электрических систем; · электрические блоки и устройства системы АГС-8М.720; · оборудование и аппаратура информационно-переговорной системы и радиосвязи; · блоки и устройства контроля скольжения колесных пар; · различные датчики и сигнальные устройства (охранная сигнализация, датчики положения дверей и др.); · электрические устройства пневматических приборов; · электрические кабели, жгуты, провода и соединители.
Аппараты электрической схемы вагона. Токоприемники. Токоприемники рельсовые типа ТР-7Б с пневматическим приводом предназначены для токосъема электроэнергии постоянного тока 750 В с контактного рельса для питания высоковольтных силовых и вспомогательных цепей вагонов.Токоприемники устанавливаются на передние моторные и не моторные тележки головных и промежуточных вагонов.
Конструкция токоприемника.
Муфта соединительная.
Муфта соединительная СВ-4А предназначена для соединения монтажных проводов, идущих от токоприемников к силовой цепи. Конструкция муфты.
Муфта состоит из контактного зажима, расположенного внутри изоляционной и металлической труб. В торцы металлической трубы вставлены резиновые втулки для уплотнения провода. Механическое крепление провода осуществляется гайками которые наворачиваются на трубу с двух сторон. Муфты в количестве четырех устанавливаются под вагоном в горизонтальном положении. Монтажные провода уплотняются при установке муфт. Земляная коробка.
Состоит: из металлического ящика с крышкой внутри которого на изоляционной панели установлены зажимы крепления проводов,подлежащих заземлению.
Блок распределительного устройства (БРУ-03). Блок предназначен для ручного отключения силовых цепей вагона метрополитена от токоприемника и их заземления, а также защиты высоковольтных силовых и вспомогательных цепей с помощью предохранителей от токов короткого замыкания и перегрузок. Рабочее номинальное напряжение блока 750 В, номинальный ток 630 А, вид привода - ручной. Конструкция блока.
Блок представляет собой металлический корпус, внутри которого на пластмассовой панели закреплены блок предохранителей и блок разъединителя. Блок предохранителей содержит:
Блок разъединителя представляет собой пластмассовую плиту, на которой установлены ножи разъединителя. Управление ими производится с помощью реверсивной рукоятки Блок разъединителя предусматривает два рабочих положения:
Внутри блока предусмотрены места для установки огнетушителя типа ОСП и датчика температуры типа ДПС.БРУ устанавливается на кронштейнах рамы вагона, без изоляторов. Над ним установлен водоотталкивающий козырек.
Токоотвод (УТ-01).
Токоотвод состоит из корпуса и крышки выполненных из текстолита с нанесенем специального защитного покрытия. В корпусе токоотвода размещается рычаг, который посредством пружины обеспечивает контактное прижатие щеток к диску, установленному на торцевую часть оси колесной пары. Подвод тока осуществляется с диска через щетки на шину, к которой крепится болтом подходящий провод.
Модуль силового инвертора Модуль силового инвертора (МСИ) преобразует входное напряжение контактной сети постоянного тока в 3-фазное напряжение переменного тока для питания 4-х асинхронных тяговых двигателей вагона, включенных параллельно. В состав МСИ так же входит чоппер тормозного реостата тягового привода. Работа инвертора Управление силовым инвертором осуществляется блоком БУТП, который формирует импульсы управления транзисторами МСИ. С выхода БУТП управляющие импульсы поступают на платы драйверов силовых транзисторов. При передаче импульса управления к транзистору драйвер обеспечивает гальваническую развязку цепей и формирует специальные траектории отпирания и запирания транзисторов инвертора, а также необходимые для этого полярности напряжения на затворах транзисторов. Управление силовым инвертором осуществляется по методу широтно-импульсной модуляции. В приводе использован алгоритм векторной ШИМ, что обеспечивает высокую степень использования напряжения звена постоянного тока и минимизацию динамических потерь в инверторе. ЛИНЕЙНЫЙ КОНТАКТОР (ЛК). ЛК представляет собой однополюсный электромагнитный контактор постоянного тока. Он предназначен для отключения тягового привода от контактной сети в случае возникновения неисправности в штатном режиме и при электрическом реостатном торможении без рекуперации энергии в контактную сеть.
Управляющее устройство включает сердечник (7), катушку (8), магнитопровод (9) и замыкающий стержень (10). Подвижный контакт регулируется управляющим механизмом с помощью изолирующего звена (рычага).
Подвижной контакт установлен на пружинах во избежание колебаний и для правильного движения.
Дугогасительная камера (11) установлена к контактной группе и закреплена блокирующим рычагом. (12). Для обеспечения надежного гашения дуги, дугогасящая камера оснащена парой катушек (13), которые проводят ток только во время размыкания. Вспомогательные контакты (15) могут быть нормально разомкнутыми и нормально замкнутыми.
Работа контактора. Срабатыванием линейного контактора управляет БУТП. В нормальных рабочих условиях, когда требуется размыкание линейного контактора, сначала снимаются управляющие сигналы с транзисторов МСИ. Таким образом, контактору не требуется разрывать цепь под нагрузкой. Однако, при возникновении аварийной ситуации линейный контактор способен разорвать ток нагрузки. Кроме того, линейный контактор ЛК является частью цепи предварительного заряда конденсатора сетевого фильтра. Перед замыканием линейного контактора на короткое время замыкается зарядный контактор ЗК, подсоединяя к источнику питания 750 В конденсатор фильтра через зарядный резистор Rs. После того, как конденсатор фильтра зарядился, замыкается линейный контактор, ЗК размыкается, исключая резистор Rs из силовой цепи, и тяговый инвертор получает питание через ЛК. Линейный контактор имеет вспомогательные контакты, использующиеся для передачи в БУТП информации о состоянии главных контактов. Зарядный контактор (ЗК).
Конструкция контактора. Контактор является устройством, управляемым электромагнитным полем.Он снабжёндвойной размыкающей цепью. Все элементы конструкции собираются на скобе (1). Контактор состоит из следующих элементов: якорь (2), катушка (3), управляющая катушка состоит из двух последовательно включенных катушек. Система контактов вспомогательной цепи (4), камерами (5). Параллельно катушке контактора подключен обратный диод, расположенный за контактором. Работа контактора. Зарядный контактор подключает подводимое напряжение 750В контактной сети через зарядный резистор к тяговому инвертору для заряда конденсатора сетевого фильтра. Контактором управляет БУТП,включая его через промежуточное реле на панели реле. При замыкании быстродействующего выключателя начинается процесс заряда конденсатора сетевого фильтра. Нормально разомкнутые контакты главной цепи контактора на короткое время замыкаются, подключая конденсатор к напряжению 750 В через резистор заряда конденсатора Rs. После того, как конденсатор зарядился, замыкается линейный контактор ЛК. Зарядный контактор размыкается, и тяговый инвертор получает питание через линейный контактор. Таким образом, зарядный контактор замыкается под нагрузкой и размыкается без нагрузки, когда зарядный резистор и контактор зашунтированы линейным контактором.
Датчик тока. Предназначен для формирования электрических сигналов, пропорциональных измеряемому току, и передаче этих сигналов в БУТП в качестве сигналов обратных связей для управления модулем силового инвертора и защиты тягового привода от перегрузок. Силовые кабели подключаются к шине, проходящей через центр датчика. Провода управления крепятся к четырём клеммам.
Датчик тока состоит из преобразователя тока (1), первичной силовой шины (2) и крепежных накладок (3), которые фиксируют преобразователь на силовой шине с помощью двух болтов.
Работа датчика. Датчик тока представляет собой измерительный преобразователь, основанный на эффекте Холла. Датчик имеет гальваническую развязку между силовой и вторичной (управляющей) цепями датчика тока (ДТ). С выхода датчика снимается ток, величина которого прямо пропорциональна величине тока, текущего в первичной цепи. Датчик напряжения. Предназначен для формирования электрических сигналов, пропорциональных измеряемому напряжению, и передаче этих сигналов в БУТП в качестве сигналов обратных связей для управления модулем силового инвертора и защиты тягового привода от перегрузок. B контейнере тягового инвертора расположены три датчика напряжения: - датчик линейного напряжения (ДН1) измеряет напряжение U c - датчики линейного напряжения ДНУаЬ и ДНУса на выходе Конструкция датчика.
Датчик напряжения является неразъёмным устройством. Резистор первичной обмотки расположен в корпусе датчика. Силовые кабели, провода управления и провода заземления подключаются к семи клеммам. Работа датчика. Датчик напряжения представляет собой измерительный преобразователь, основанный на эффекте Холла. Датчик имеет гальваническую развязку между первичной (силовой) вторичной (управляющей) цепями. С выхода датчика снимается ток, величина которого прямо пропорциональна величине напряжения, приложенного к первичной цепи.
ПАНЕЛЬ РЕЛЕ (ПР). Панель реле предназначена для управления электрическими цепями включения линейного и зарядного контакторов по командам БУТП, а также для формирования сигналов направления движения и признака резервного управления для БУТП по командам БУВ и пульта машиниста.
Работа панели. Панель реле получает питание: - 80 В - от бортовой сети через БУТП и от пульта машиниста. - 24 В - от БУВ. - К1-промежуточное реле команды направления движения «Вперед», поступающей с БУВ. - К2-промежуточное реле команды направления движения - КЗ–промежуточное реле цепи управления линейным - К4-промежуточное реле цепи управления зарядным - К5-резерв. - К6-реле выбора цепей управления направлением движения от - диодно-резистивная сборка - формирует сигнал резервного
Дроссель сетевого фильтра. Дроссель вместе с конденсатором фильтра составляют LC-фильтр низких частот. Эта цепочка уменьшает колебания тока, создаваемые силовым инвертором и тем самым уменьшают помехи, передающиеся в контактную сеть. Фильтр также защищает тяговое оборудование от бросков напряжения в контактной сети.
Дроссель состоит из медной катушки (1), которая крепится на магнитопроводе бронестержневого типа без зазора (2) с помощью неразборного соединения. Магнитопровод выполнен из шихтованной стали и стянут в пакет уголками (3), (4) и шпильками М20 (5). Кожухи (6) и (7) служат для защиты выступающих за магнитопровод частей катушки от механических повреждений. Для герметизации подвода внешних кабелей имеется клеммная коробка (8). К раме вагона дроссель крепится с помощью скоб (9) четырьмя болтами М16. Подвод внешних кабелей к клеммам дросселя производится через четыре кабельных ввода (10). Рядом с клеммной коробкой расположен болт заземления
Работа дросселя. Дроссель сетевого фильтра работает вместе с конденсатором фильтра. Эта цепочка подавляет колебания линейного тока силового инвертора и тем самым уменьшает помехи в контактной сети. Фильтр также защищает тяговое оборудование от бросков тока и напряжения в питающей сети. Работа конденсатора. Конденсатор совместно с дросселем составляют LC-фильтр низких частот. Эта цепочка уменьшает колебания тока, создаваемые инвертором и тем самым уменьшают помехи, передающиеся в сеть. Фильтр также защищает тяговое оборудование от бросков напряжения в контактной сети. Разрядный резистор конденсатора фильтра (Rp) обеспечивает разряд конденсатора перед проведением работ. Промежуточный дроссель. Промежуточный дроссель фильтра Ln представляет собой низкоиндуктивный дроссель, подавляющий колебания тока, которые могут возникать между конденсатором фильтра Сф и конденсатором фильтра Си, установленном в модуле силового инвертора. Колебания тока могут быть вызвана зарядом конденсатора фильтра, изолирующими вставками контактной сети или размыканием ВБ. Конструкция дросселя.
Работа дросселя. Промежуточный дроссель Ln является частью звена постоянного тока, включённого между конденсатором главного фильтра Сф и конденсатором модуля силового инвертора Си. Промежуточный дроссель фильтра сглаживает колебания тока, которые могут возникать Между конденсаторами колебания тока могут быть вызваны зарядкой конденсатора фильтра проездом токоразделов и отключением БВ.
ТОРМОЗНОЙ РЕЗИСТОР. Предназначен для гашенияэлектрической энергии торможения, поступающей от тягового привода, когда тяговая сеть не может принимать эту энергию.
Работа резистора. Модуль тягового инвертора оснащён реостатным тормозным чоппёром, который обеспечивает электрическое торможение, когда тяговая сеть не принимает энергию. При этом ток замыкается через тормозной резистор. Вентилятор тормозного резистора работает постоянно: в тяговом режиме, в тормозном режиме и на стоянке. При скорости движения вагона меньше 10 км/ч блок питания вентиляторов переводит его, в работу на скорости вращения 1420 об/мин. Это обеспечивает при подъезде к станции и на станции существенное снижение шума, создаваемого работой вентилятора.
Датчик частоты вращения ротора (вала) тягового двигателя (ДВЧ).
Конструкция датчика. Датчик частоты вращения состоит из измерительной головки в стальной оболочке (1), проводника (2) и соединителя (3). Стальная оболочка с фланцем крепления позволяет устанавливать датчик в специальный корпус на тяговом двигателе. Работа датчика. Работачувствительного элемента ДЧВ основана на эффекте Холла. Измерительная головка установлена рядом с зубчатым колесом на неприводном конце вала двигателя. Чувствительный измерительный элемент головки определяет момент прохождения зубца рядом с ним. Каждый раз, когда зубец колеса проходит перед элементом, выход датчика меняет состояние. Таким образом, на выходе датчика образуется последовательность электрических импульсов, частота следования которых пропорциональна частоте вращения вала двигателя.
Подшипниковые щиты
Подшипниковые щиты устанавливаются в статор с двух сторон. Подшипники щитов опираются на вал тягового двигателя.
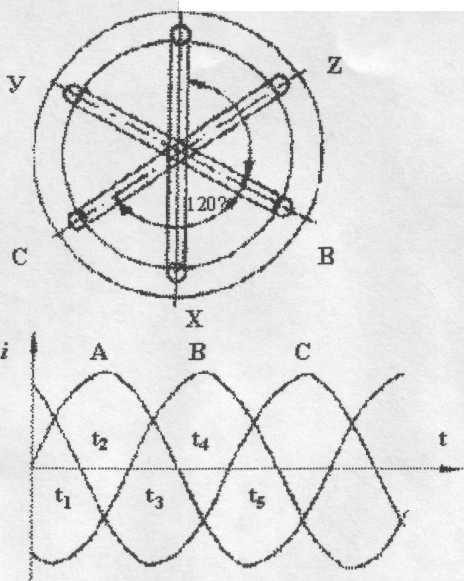
ПРИНЦИП ОБРАЗОВАНИЯ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ МАШИНЫ. На статоре трехфазного двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты друг от друга во времени на 1/3 периода.
Токи в трехфазной обмотке
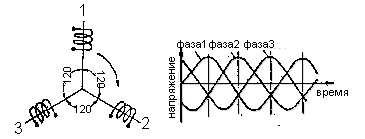
Образование вращающегося магнитного поля. Асинхронные двигатели широко применяются в промышленности. Эти двигатели состоят из двух основных частей: неподвижной – статора и вращающейся – ротора. В асинхронном двигателе переменный трехфазный ток включается в обмотку статора, состоящую из трех самостоятельных частей. Как видно из графика изменений трехфазного тока напряжение достигает максимального значения не одновременно во всех трех фазах, а попеременно, через равные промежутки времени, то в одной, то в другой, то в третьей фазе. Следователь но, если включить такой ток в три обмотки, расположенные так, как это показано на
Максимальное значение магнитного потока будет создаваться то в первой, то во второй, то в третьей обмотке, соответственно максимальным значениям тока в фазах, подключенных к этим обмоткам. Магнитное поле, перемещающееся таким образом по замкнутому кругу, называется вращающимся магнитным полем. Описанное создание вращающегося магнитного поля поясняется рис. Если подключить фазу к первой катушке обмотки двигателя, фазу 2 ко второй катушке, а фазу 3 к третьей катушке обмотки, то в момент времени t1 максимальный поток будет в первой катушке, так как в это время сила тока в фазе 1, подключенной к первой катушке, будет иметь максимальное значение. Затем сила тока в фазе 1 постепенно ослабевает и, переходя через нуль, меняет направление, в это время увеличивается значение силы тока в фазе 2 и к моменту времени t2 сила тока в фазе 2 достигает максимального значения, поэтому максимальный поток уже создастся не первой катушкой, а второй. Это в свою очередь означает, что магнитное поле повернулось на 120°. К моменту времени t3 максимум тока будет в фазе 3, а максимум потока будет создаваться третьей катушкой — магнитное поле повернулось еще на 120º. К моменту времени t4 создается такая же картина поля, как и в момент времени t1,т. е. снова максимума ток достигает в фазе 1, а максимальный магнитный поток создается первой катушкой Это значит, что за время t1 - t2магнитное поле повернулось на 360° (совершило полный оборот). Обмотка ротора асинхронного двигателя замкнута на себя, или на сопротивление. При неподвижном роторе и наличии тока в обмотке статора силовые линии вращающегося магнитного ноля пересекают неподвижные витки обмотки ротора, в результате чего в обмотке ротора появляется ЭДС и ток. Этот ток, взаимодействуя с полем статора, создает вращающий момент, стремящийся повернуть ротор в сторону вращения поля. Ротор двигателя начнет вращаться. По мере увеличения скорости ротора уменьшаются число пересекаемых силовых линий и ЭДС и, следовательно, ток ротора асинхронного двигателя. Однако ротор никогда не достигает скорости поля, а всегда вращается. Это отставание ротора от ноля статора называют скольжением. Чем больше нагрузка на валу двигателя, тем больше скольжение. Выражается скольжение в процентах или в относительных единицах. Обычно асинхронные двигатели имеют при полной нагрузке скольжение 2—4%. Скорость вращения ротора асинхронного двигателя определяется по формуле:
где n—скорость вращения ротора, об/мин; f — частота питающей сети; p— число пар полюсов; s — скольжение. ПРИНЦИП ДЕЙСТВИЯ АСИНХРОННОГО ДВИГАТЕЛЯ. Вращающееся магнитное поле статора пересекает проводники обмотки ротора и наводит в них ЭДС. Так как роторная обмотка замкнута, то в проводниках ее возникают токи. Ток каждого проводника, взаимодействуя с полем статора, создает электромагнитную силу – Fэм. Совокупность сил всех проводников обмотки создает электромагнитный момент М, который приводит ротор во вращение в направлении вращающего поля. Частота вращения ротора n2 будет всегда меньше синхронной частоты n1 т.е. ротор всегда отстает от поля статора. Поясним это следующим образом. Пусть ротор вращается с частотой п2 равной частоте вращающегося поля статора n1. В этом случае поле не будет пересекать проводники роторной обмотки. Следовательно, в них не будет наводиться ЭДС и не будет токов, а это значит, что вращающий момент М = 0. Таким образом, ротор асинхронного двигателя принципиально не может вращаться синхронно с полем статора. Разность между частотами поля статора n2 и ротора n1 называется частотой скольжения Δn: Δn=n1-n2 Отношение частоты скольжения к частоте поля называется скольжением:
Обмотка ротора асинхронного двигателя электрически не связана с обмоткой статора. В этом отношении двигатель подобен трансформатору, в котором обмотка статора является первичной обмоткой, а обмотка ротора - вторичной. Разница состоит в том, что ЭДС в обмотках трансформатора наводится не изменяющимся во времени магнитным потоком, а ЭДС в обмотках двигателя - потоком постоянным по величине, но вращающимся в пространстве. Эффект в том и в другом случаях будет одинаковым. В отличие от вторичной обмотки трансформатора, неподвижной, обмотка ротора двигателя вместе с ним вращается. ЭДС роторной обмотки, в свою очередь, зависит от частоты вращения ротора. В этом нетрудно убедиться, анализируя процессы, протекающие в асинхронном двигателе. Синхронная частота вращения магнитного поля статора перемещается относительно ротора с частотой скольжения Δn. Она же наводит в обмотке ротора ЭДС Е2, частота которой f2 связана со скольжением S:
Учитывая, что fi=pn1/60, f2=pn1S/60. Приняв величину номинального скольжения порядка 0,01-0,1, можно подсчитать частоту изменения ЭДС в роторной обмотке, которая составляет 0,5-5 Гц (при ^=50 Гц). Холла эффект.
Если в магнитное поле с индукцией В поместить проводник или электронный полупроводник, по которому течет электрический ток плотности j, то на электроны, движущиеся со скоростью v в магнитном поле, действует сила Лоренца F, отклоняющая их в определенную сторону.
отрицательный заряд Рис 1
На противоположной стороне скапливаются положительные заряды.
Действие силы Лоренца на движущийся положительный заряд Рис.2 Поперечное электрическое поле препятствует отклонению движущихся заряженных частиц магнитным полем. Образующаяся разность потенциалов: j = R(B-I/d), где j - сила тока; d - линейный размер образца в направлении вектора В; R - постоянная Холла. Знак постоянной Холла позволяет определить тип преимущественной проводимости полупроводника. Эффект открыт американским физиком Э.Холлом (E.Hall; 1855-1938).
Применение эффекта. Датчики Холла применяются в генераторах Холла и датчиках тока.
Генератор Холла - измерительный прибор для определения индукции магнитного поля
Его принцип действия основан на измерении ЭДС Холла Un, пропорциональной магнитной индукции поля, при постоянном управляющем токе /st. При помощи добавочного сопротивления i?v устанавливается оптимальное значение управляющего тока, которое контролируется вольтметром через падение напряжения на резисторе i?N. Этот же вольтметр переключается для измерения ЭДС Холла. При наличии двух прямоугольных расположенных напротив друг друга датчиков Холла можно определить направление магнитного поля. Вагоны приводится в движение с помощью четырех асинхронных тяговых двигателей с короткозамкнутым ротором, которые установлены на моторных тележках. Крутящий момент от тяговых электродвигателей через редукторы передается к колесным парам. Управление поездом (вагоном) осуществляется из кабины управления вагона 81-740, в которой располагаются пульт машиниста основной (ПМО) с контроллером машиниста и блоком контроллеров реверса, пульта машиниста вспомогательного (ПМВ), кран машиниста, а также органы управления дверями, тормозами и другими системами, установленными на вагонах. Обеспечение тормозных систем, пневматических и электропневматических приборов вагонов сжатым воздухом обеспечивается компрессорными агрегатами типа, включение и отключение которых в зависимости от давления воздуха в напорных магистралях, осуществляется автоматически. Цикл движения поезда (вагона) включает в себя следующие режимы: разгон, выбег и торможение. Управление режимами движения поезда на линиях, безопасность движения и контроль состояния вагонного оборудования осуществляется автоматически или в ручном режиме системой управления «Витязь-1 М». Для торможения поезда (вагона) предусмотрены следующие виды тормозов: 1) Электродинамический следящий рекуперативно-реостатный – рабочий,с дотормаживанием электропневматическим тормозом со скорости не более 7 км/ч; 2) Электропневматический колодочный – резервный, с помощью которого осуществляется: - ступенчатое торможение от кнопок на пульте машиниста и ступенчатый отпуск; - экстренное торможение от «петли безопасности» или вентиля резервирования «петли безопасности»; - экстренное торможение по командам АРС, от стоп-крана и срывного клапана автостопа; 3) Аварийный – пневматический от крана машиниста; 4) Стояночный, с пневмопружинным приводом, удерживающий вагон с максимальной нагрузкой на уклоне до 600/00. Электродинамический и фрикционный колодочный тормоз с пневматическим приводом обеспечивают полное и плавное торможение вагонов с любой скорости в пределах конструкционной до полной остановки. Тормозное усилие этих тормозов регулируется автоматически в зависимости от нагрузки. Стояночный тормоз вступает в действие при установке органов управления вагона (поезда) в режим стоянки (контроллер реверса находится в положении «0», отсутствует команда «Вперед», «Назад»). Противоюзное устройство исключает блокировку колес при торможении. Пневматический тормоз автоматически срабатывает от стоп-крана, срывного клапана автостопа, а также при разрыве поезда и скатывании под уклон. Двигатели включены в электрическую силовую схему вагона параллельно. Параллельная работа четырех тяговых двигателей вагона обеспечивается при микропроцессорном управлении трехфазным инвертором, работающим от напряжения контактной сети 750 В постоянного тока. Питание инвертора осуществляется через токоприемники типа ТР-7Б, установленные на передней моторной и не моторной тележках по одному с каждой стороны. Питание на электродвигатели поступает от инвертора напряжения, работающего в режиме ШИМ (широтно-импульсной модуляции). ШИМ позволяет подавать на электродвигатели симметричное трехфазное напряжение с регулируемой амплитудой и частотой. Контроль фазного напряжения производится датчиками с гальванической развязкой, непосредственно подсоединенными к выходу инвертора. Контроль тока используется для управления инвертором и осуществляется с помощью датчиков, подключенных на выходе инвертора. Ограничение величины изменения ускорения осуществляется в зависимости от сигнала уставки, формируемом контроллером машиниста и передаваемом через интерфейс системы управления вагоном (система «Витязь-1М»), откуда так же поступает и информация о величине загрузки вагона. Это позволяет учесть изменение веса вагона до передачи цифровых сигналов уставок тягового или тормозного усилий через последовательный канал передачи в систему управления тяговым приводом. Тяговая система не предусматривает непосредственного управления механическим (пневматическим колодочным) тормозом. Логический сигнал, указывающий на наличие электрического торможения, передается в систему управления поездом (вагоном), которая при этом вырабатывает сигнал на запрет пневматическое торможение. При скорости 9 км/ч этот сигнал снимается с продолжающим некоторое время действовать электрическим тормозом для того, чтобы дать пневматическому тормозу вступить в работу, Со скорости 7 км/ч пневматический тормоз замещает электрический до окончательной остановки. В случае отказа электрического тормоза или включения аварийного торможения данный сигнал снимается и далее все торможение происходит механически. Блок управления тяговым приводом (БУТП) имеет систему обнаружения юза-буксования, которая в случае юза колеса быстро снижает тормозное усилие. При этом снижается уставка, чтобы скорректировать усилие под действительную степень сцепления с рельсом. В случае буксования уставка тока также снижается. При прекращении юза-буксования происходит двухступенчатая автоматическая корректировка токовой уставки. Сначала с темпом до 5% от номинальной величины уставки, затем с более медленным темпом. Если юз-буксование происходит повторно, то система автоматически снижает уставку, и затем последовательно переустанавливает ее до достижения желаемого усилия с учетом 90% от имеющейся степени сцепления с рельсом.
Работа датчика. При вращении вала двигателя, а вместе с ним и зубчатого колеса, каждый раз, когда зубец проходит перед измерительным элементом головки, выход датчика меняет состояние, что приводит к образованию на выходе датчика последовательных электрических импульсов, частота следования которых пропорциональна частоте вращения вала двигателя.
СОКРАЩЕНИЯ. Схема силовая. ТР - токоприёмник. БСТД. - блок соединительный с датчиками тока БРУ. - блок распределительных устройств. ГП. - главный предохранитель. FU. - плавкий предохранитель. ГВ. - главный разъединитель. БВ. - быстродействующий выключатель. ТП. - тяговый привод. ЛК. - линейный контактор. ЗК - зарядный контактор. Сф. - конденсатор. СИ. - силовой инвертор.
|
||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-06; просмотров: 679; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.128.94.171 (0.16 с.) |





 Токоотвод (заземляющее устройство) предназначен для осуществления электрической связи силовых цепей тягового электропривода с ходовыми рельсами, к которым подключен минусовой вывод источника питания тяговой сети. Электрическая связь осуществляется через медно-графитовые щетки, скользящие по оси колесной пары. Крепление токоотводов к буксе производится четырьмя болтами. Токоотводы УТ-01 устанавливаются на буксах колесных пар тележек вагона, как моторных, так и не моторных, по одному токоотводу на колесную пару.
Токоотвод (заземляющее устройство) предназначен для осуществления электрической связи силовых цепей тягового электропривода с ходовыми рельсами, к которым подключен минусовой вывод источника питания тяговой сети. Электрическая связь осуществляется через медно-графитовые щетки, скользящие по оси колесной пары. Крепление токоотводов к буксе производится четырьмя болтами. Токоотводы УТ-01 устанавливаются на буксах колесных пар тележек вагона, как моторных, так и не моторных, по одному токоотводу на колесную пару.

 Основная цепь включает верхний вывод (1), неподвижный контакт (2), подвижный контакт (3), опора подвижного контакта (4), гибкое соединение (5) и нижний вывод (6).
Основная цепь включает верхний вывод (1), неподвижный контакт (2), подвижный контакт (3), опора подвижного контакта (4), гибкое соединение (5) и нижний вывод (6). Предназначен для подключения к контактной сети зарядного сопротивления конденсатора сетевого фильтра с целью ограничения тока заряда конденсатора.
Предназначен для подключения к контактной сети зарядного сопротивления конденсатора сетевого фильтра с целью ограничения тока заряда конденсатора.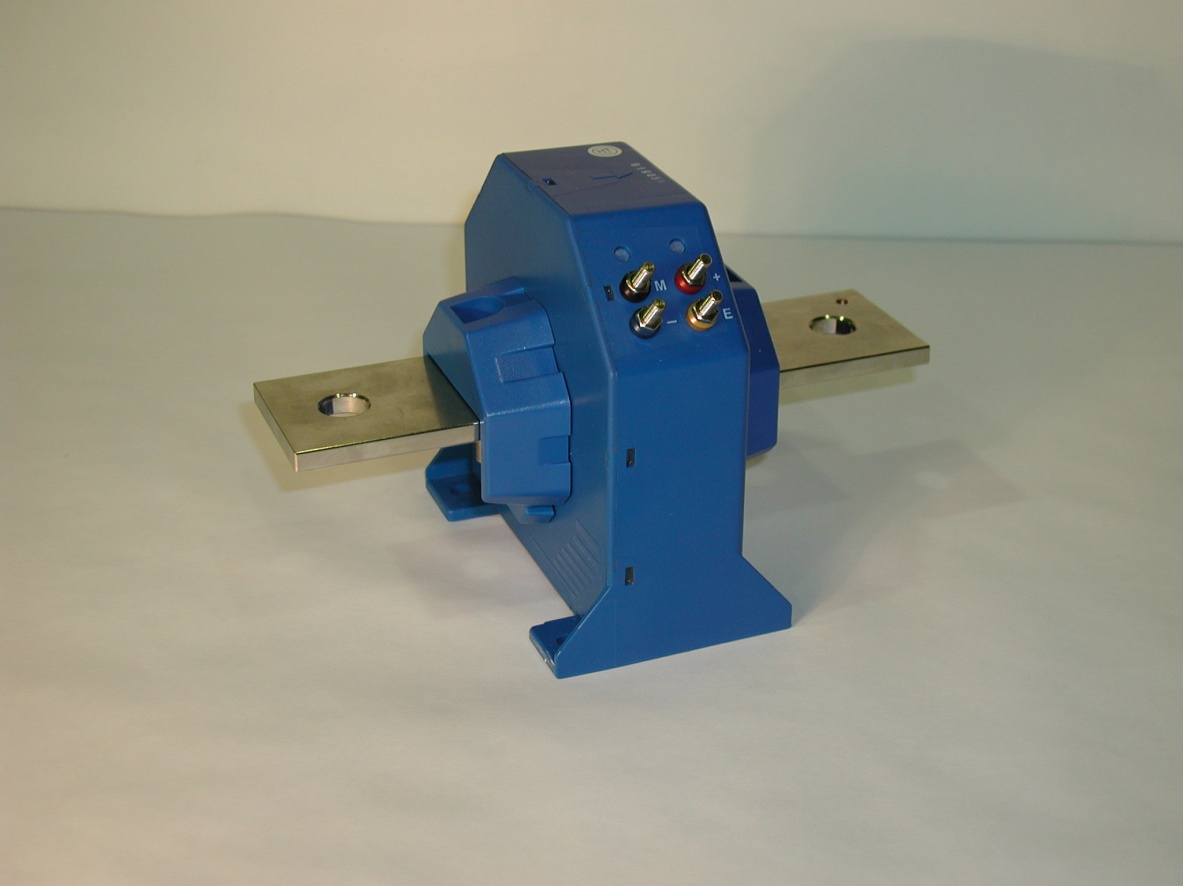 Конструкция датчика
Конструкция датчика
 Панель реле представляет собой несущую текстолитовую плиту с установленными на ней электромеханическими реле, электрическими и электронными компонентами. На панели (1) установлены четыре реле типа РТ16 (2). Два малогабаритных реле для связей с БУВ установлены на печатной плате (3), диодно-резистивная сборка выполнена на панели (4). Связь панели реле с электрическими цепями контейнера осуществляется через разъем(5).
Панель реле представляет собой несущую текстолитовую плиту с установленными на ней электромеханическими реле, электрическими и электронными компонентами. На панели (1) установлены четыре реле типа РТ16 (2). Два малогабаритных реле для связей с БУВ установлены на печатной плате (3), диодно-резистивная сборка выполнена на панели (4). Связь панели реле с электрическими цепями контейнера осуществляется через разъем(5).
 Дроссель представляет собой низкоиндуктивную катушку (1), навитую силовым кабелем з отверстия электроизоляционной стёклотекстолитовой несущей напели (2) На концы катушки опресованны наконечники (3) для подключения дросселя. К несущей панели через четыре шпильки прикручены две стальные пластины (4), которые через четыре крепежных отверстия (5) фиксируют дроссель в отсеке контейнера.
Дроссель представляет собой низкоиндуктивную катушку (1), навитую силовым кабелем з отверстия электроизоляционной стёклотекстолитовой несущей напели (2) На концы катушки опресованны наконечники (3) для подключения дросселя. К несущей панели через четыре шпильки прикручены две стальные пластины (4), которые через четыре крепежных отверстия (5) фиксируют дроссель в отсеке контейнера.


 рисунке:
рисунке:

 В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение SH обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
В общем случае скольжение в асинхронном двигателе может изменяться от нуля до единицы. Однако номинальное скольжение SH обычно составляет от 0,01 до 0,1 %. Преобразуя выражение *), получим выражение частоты вращения ротора:
 Эффектом Холла называется возникновение поперечного электрического поля и разности потенциалов в проводнике или полупроводнике, по которым проходит электрический ток, при помещении их в магнитное поле, перпендикулярное к направлению тока.
Эффектом Холла называется возникновение поперечного электрического поля и разности потенциалов в проводнике или полупроводнике, по которым проходит электрический ток, при помещении их в магнитное поле, перпендикулярное к направлению тока.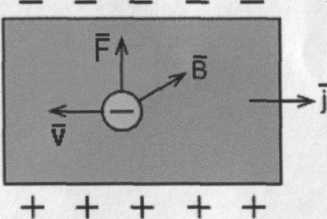 Действие силы Лоренца на движущийся
Действие силы Лоренца на движущийся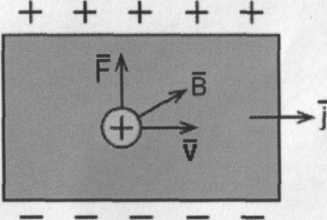 В дырочном полупроводнике знаки зарядов на поверхностях меняются на противоположные (рис. 2).
В дырочном полупроводнике знаки зарядов на поверхностях меняются на противоположные (рис. 2).



