Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Граф.3. Дисперсия измерителей и входного сигнала. Помехозащищенность. ⇐ ПредыдущаяСтр 4 из 4
Выводы: дисперсии ошибок обоих измерителей в исправном состоянии больше влияют на дисперсию ошибки оценки, чем дисперсии ошибок обоих измерителей при неисправности.
Граф.4. Коэффициенты корреляции ПИ. Помехозащищенность. Вывод: коэффициент корреляции ПИ при исправности обоих измерителей влияет на дисперсию ошибки оценки значительно больше, чем коэффициенты корреляции ПИ при неисправности одного из измерителей и коэффициент корреляции ПИ при неисправности обоих измерителей. Исследование ошибок и достоверности классификации комплексной системы. Исходные данные для расчета параметров подсистемы контроля с учетом нормирования к среднеквадратическому отклонению определяется:
ε = EPS = 0 – поле допуска погрешности. η = ETA = 0 – систематическая погрешность измерения. (∆) Исследуем ошибки классификации КС.
В результате исследования получились следующие значения:
Параметры системы контроля, рассчитанные в программе CLASS4 1) Параметры системы контроля «Риск изготовителя» αi = 0,0489 «Риск заказчика» βi = 0,0385 Вероятность нахождения результата измерения в поле допуска Pyi = 0,6718 Вероятность нахождения сигналов в полях допусков P0i = 0,682 Вероятность сигнала «годен» D0 = 0,633 Вероятность сигнала «не годен» D1 = 0,279
Робастность и помехозащищенность системы классификации 1) Параметры системы контроля по параметру ε
Kr(+) = 0,032 Kr(-) = 0,026 Следовательно, система робастна по параметру
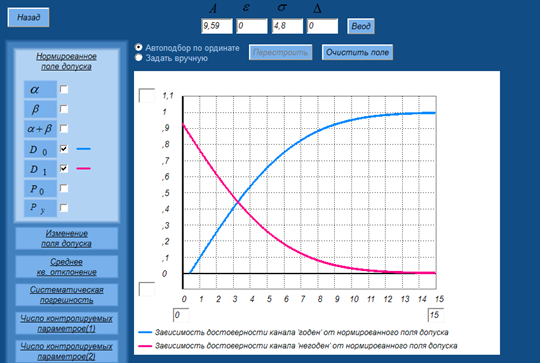
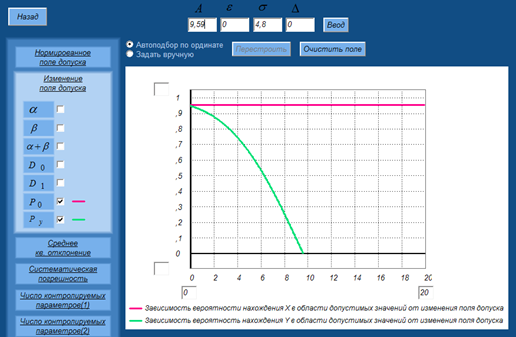
2) По параметру Dl Dl = 9,59 Система не помехозащищена по параметру Dl при Kp ( 3) По параметру σ σ = 4,8 Kp(+10%) = 0,092 Kp(-10%) = 0,08 Из графика на рис.10 видно, что с увеличением значения σ, уменьшается и вероятность риска заказчика и риска изготовителя, следовательно система является помехозащищенной по параметру σ.
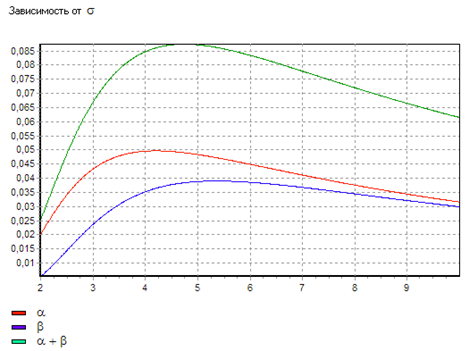
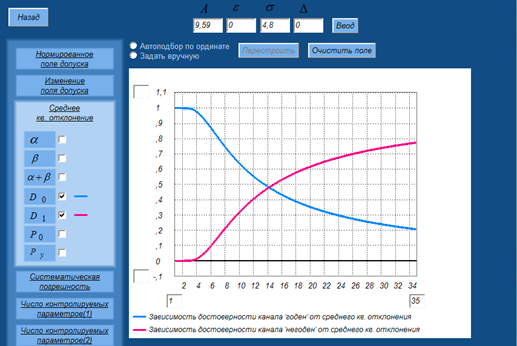
Граф. 5 Зависимость
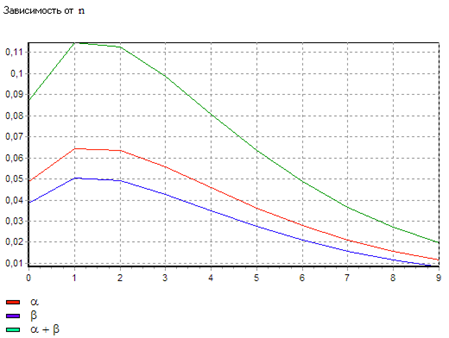
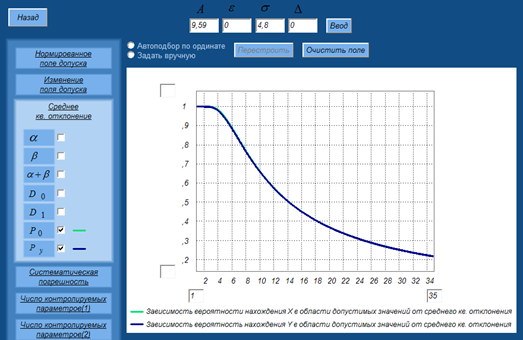
Граф. 6. Зависимость
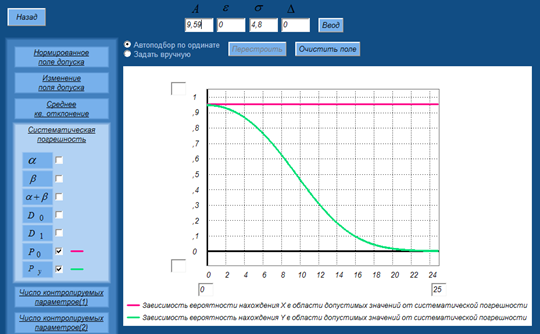
Граф. 7.Зависимость
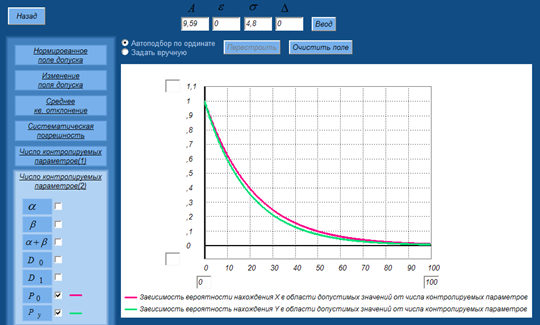
Граф. 8.Зависимость
Достоверности каналов «годен» D0 и «негоден» D1
Вероятности нахожения ПС (P0) и оценки ПС (Px) в области допустимых значений
Достоверности каналов «годен» D0 и «негоден» D1
Вероятности нахожения ПС (P0) и оценки ПС (Px) в области допустимых значений
Достоверности каналов «годен» D0 и «негоден» D1
Вероятности нахожения ПС (P0) и оценки ПС (Px) в области допустимых значений
Достоверности каналов «годен» D0 и «негоден» D1
Вероятности нахожения ПС (P0) и оценки ПС (Px) в области допустимых значений
Достоверности каналов «годен» D0 и «негоден» D1
Вероятности нахожения ПС (P0) и оценки ПС (Px) в области допустимых значений
Достоверности каналов «годен» D0 и «негоден» D1
Вероятности нахожения ПС (P0) и оценки ПС (Px) в области допустимых значений Заключение В процессе исследования были проведены расчеты линейной безынерционной оптимально и оптимально-инвариантной алгоритмов обработки информации с учетом и без учета корреляции погрешности измерений. На основании анализа данных для технической реализации был выбран оптимально-инвариантный алгоритм (который немного уступает оптимальному, но проще) с учетом корреляции погрешностей измерения с учетом показаний реальной контрольной аппаратуры, D=13,06431, Г1=1,70158, Г2=4,78096. Было проведены исследование, анализ и расчеты робастности и помехозащищенности комплексной системы, сравнение инерционной обработки с безынерционной, исследование ошибок и достоверности классификации сигналов. Были проведены исследования и анализы робастности системы. Система неробастна по левой и правой границе по каналу первого измерителя (a100), по правой границе для второго измерителя (a210). Так же было проведено исследование помехозащищенности системы. Система не помехозащищена по левой границе для Р1ио с коэффициентом помехозащищенности k=1,65144, Р2ии с коэффициентом помехозащищенности k=-0,43762, D1исп по левой и правой границе с коэффициентом помехозащищенности k=0,43704. Чтобы обеспечить робастность и помехозащищенность нужно ужесточить требования к отклонению параметров, а также использовать более точные исходные данные. Вероятность сигнала «годен» D0 = 0,633 Вероятность сигнала «не годен» D1 = 0,279
Риск изготовителя αi = 0,0489 Риск заказчика βi = 0,0385 Сумма рисков = 0.0874 Система робастна по параметру ε=-0,3 с коэффициентами Kr(+) = 0,032 Kr(-)=0,0026, не помехозащищена по параметру Dl=9,59 и по параметру σ=4,8 с коэффициентами Kp(+)=0,092 Kp(-)=0,8.
8.1 Общие выводы:
1)Были проанализированы данные для технической реализации
2) Был выбран оптимально-инвариантный алгоритм с учетом корреляции погрешностей измерения с учетом показаний реальной контрольной аппаратуры.
3) Было проведено сравнение алгоритмов безынерционной и инерционной обработок по критерию эффективности комплексирования.
4) Были проведены исследования и анализы робастности системы. Система неробастна по левой и правой границе по каналу первого измерителя (a100), по правой границе для второго измерителя (a200), (a210)
5) Было проведено исследование помехозащищенности системы. Система не помехозащищена по левой границе для Р1ио с коэффициентом помехозащищенности k=1,65144, Р2ии с коэффициентом помехозащищенности k=-0,43762, D1исп по левой и правой границе с коэффициентом помехозащищенности k=0,43704
Список используемой литературы. 1) Информационно-статистическая теория измерений. Ю.П. Иванов, Б.Л. Бирюков. Учебное пособие. СПбГУАП, Санкт-Петербург, 2008.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-09; просмотров: 497; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.146.65.212 (0.014 с.) |

 . (А)
. (А) . (σ)
. (σ) = -0,3
= -0,3 .
.