Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Экстремальные системы управления.
Функциональная особенность. В классе адаптивных систем экстремальные системы управления (ЭС) занимают особое место в силу специфики статической характеристики объекта управления. Статическая характеристика является нелинейной
Рис 2.8 Система экстремального управления должна по мере изменения статических свойств ОУ (непрогнозируемое смещение точки экстремума) изменять входные сигналы ОУ таким образом, чтобы они соответствовали экстремальной точке характеристики ОУ и тем самым обеспечивали работу объекта, когда выходная переменная соответствует экстремуму статической характеристики. В отличие от АдСУ, где настройка режима работы системы проводится путем изменения параметров устройства управления (УУ), в ЭС режим работы на экстремуме достигается за счет изменения входных сигналов ОУ, которые формирует экстремальный регулятор в контуре ЭС. При этом критерий оптимальности определяется естественными свойствами ОУ, а не является искусственно вводимой мерой отклонения выходной переменной реальной системы и ее эталоном. При неизменном положении статической характеристики управление Решение поставленной задачи управления объектом с экстремальной статической характеристикой возлагается на регулятор экстремальной системы (экстремальный регулятор ЭР), который совместно с ОУ образует контур системы экстремального управления (рис. 2.9).
Рис 2.9 При априорной неопределенности положения статической характеристики ОУ регулятор должен обеспечить самонастройку (адаптацию) экстремальной системы на основе текущей информации о величине выходной переменной ОУ. Следовательно, алгоритм самонастройки ЭР должен содержать процедуру (правило) определения направления изменения значений составляющих вектора управления
Поисковые и беспоисковые экстремальные системы. Алгоритм работы многих ЭС основан на использовании тестовых (поисковых) сигналов, величина которых много меньше сигнала управления. Обычная форма тестовых сигналов – гармоническое колебание или прямоугольные импульсы. Экстремальные системы, использующие тестовые сигналы, называются поисковыми. Работа этих систем, как правило, строится в два этапа. Вначале на основе поисковых сигналов определяется направление и величина изменения сигналов управления
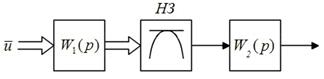
В беспоисковых ЭС рабочий и изучающий этапы совмещены. Однако, при использовании цифровых контроллеров процесс движения рабочей точки к экстремуму носит дискретный характер, так как вычислительная процедура самонастройки требует некоторого времени, в течение которого управляющий сигнал не изменяется. Как правило, реализация процедуры определения координат (значения составляющих вектора Выбор метода определяется спецификой поверхности (наличие оврагов, ложных экстремумов) нелинейной характеристики и скоростью и формой перемещения точки экстремума в пространстве управляющих воздействий (скоростью «дрейфа»). В практических задачах ОУ экстремальных систем помимо вышеописанной специфики статической характеристики обладают и определенными динамическими свойствами. В большинстве случаев имеется возможность динамические и статические особенности ОУ представить отдельными звеньями. Тогда структурная схема ОУ имеет вид рис. 2.10, где Н3 – нелинейное звено [с экстремальной статической характеристикой];
Рис 2.10 Наличие динамических звеньев в структуре ОУ вносит существенные трудности в процесс управления. При изменении входного сигнала динамического звена начинается переходный процесс и только после его окончания величина выходной переменной будет соответствовать определяемому экстремальным регулятором сигналу. Очевидно, ЭР после изменения управления
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-08; просмотров: 940; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.22.181.209 (0.005 с.) |
 и имеет экстремум (минимум или максимум), достигаемый при определенных значениях входных сигналов
и имеет экстремум (минимум или максимум), достигаемый при определенных значениях входных сигналов  . В процессе функционирования положение точки экстремума относительно входных переменных и величина экстремума
. В процессе функционирования положение точки экстремума относительно входных переменных и величина экстремума  изменяются (рис. 2.8) (характеристика «дрейфует»).
изменяются (рис. 2.8) (характеристика «дрейфует»).
 также может решить поставленную задачу при соответствующем задании
также может решить поставленную задачу при соответствующем задании  . При изменении положения характеристики
. При изменении положения характеристики  и значения экстремума, рассмотренные варианты построения систем управления не дадут желаемого результата.
и значения экстремума, рассмотренные варианты построения систем управления не дадут желаемого результата.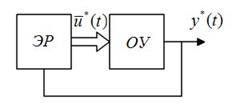
 , возможность изменять значения
, возможность изменять значения  в направлении движения к экстремальной точке статической характеристики и способность определять момент достижения этой точки. Отсюда очевидна необходимость наличия в алгоритме ЭР процедуры определения градиента статической характеристики в рабочей точке и, в первую очередь, знака этого градиента. Первые системы экстремального управления для решения практических задач были построены в середине прошлого века. Задачи самонастройки решались на базе аналоговых элементов с достаточно простой реализацией, что позволяло достаточно активно внедрять экстремальные системы на практике [14,15]. В настоящее время достижения вычислительной техники позволяют разрабатывать ЭР с достаточно сложными вычислительными процедурами, которые решают задачу самонастройки с необходимой точностью.
в направлении движения к экстремальной точке статической характеристики и способность определять момент достижения этой точки. Отсюда очевидна необходимость наличия в алгоритме ЭР процедуры определения градиента статической характеристики в рабочей точке и, в первую очередь, знака этого градиента. Первые системы экстремального управления для решения практических задач были построены в середине прошлого века. Задачи самонастройки решались на базе аналоговых элементов с достаточно простой реализацией, что позволяло достаточно активно внедрять экстремальные системы на практике [14,15]. В настоящее время достижения вычислительной техники позволяют разрабатывать ЭР с достаточно сложными вычислительными процедурами, которые решают задачу самонастройки с необходимой точностью. – этап изучения, а затем происходит изменение сигналов управления на входе объекта и перемещение рабочей точки на статической характеристике в направлении экстремума – рабочий шаг.Недостатком этих систем является необходимость воздействия на ОУ изучающих сигналов, что не всегда допустимо (например, технологический процесс химического производства) и задержка в изменении управления на время первого этапа. Эта задержка определяется в основном инерционностью ОУ, так как вычислительный процесс в современных контроллерах требует незначительного времени, много меньше динамических свойств изменения статической характеристики объекта.
– этап изучения, а затем происходит изменение сигналов управления на входе объекта и перемещение рабочей точки на статической характеристике в направлении экстремума – рабочий шаг.Недостатком этих систем является необходимость воздействия на ОУ изучающих сигналов, что не всегда допустимо (например, технологический процесс химического производства) и задержка в изменении управления на время первого этапа. Эта задержка определяется в основном инерционностью ОУ, так как вычислительный процесс в современных контроллерах требует незначительного времени, много меньше динамических свойств изменения статической характеристики объекта. и осуществляется изменение управляющих воздействий
и осуществляется изменение управляющих воздействий  – линейное динамическое звено на выходе
– линейное динамическое звено на выходе  с передаточной функцией
с передаточной функцией  представляет линейные динамические звенья по входным сигналам ОУ. Для одномерного объекта это будет одно звено
представляет линейные динамические звенья по входным сигналам ОУ. Для одномерного объекта это будет одно звено  .
.